四类计算机自动路径规划算法详解
需积分: 18 40 浏览量
更新于2024-08-04
1
收藏 1.34MB DOC 举报
"本文主要探讨了四种路径自动规划的算法,包括基于二元7次多项式的三种路径生成方法,双螺旋线路径,椭圆式双循环搜索路径以及利用π构建的对称路径。这些方案适用于AGV自动导航和机器人作业中的路径规划。文章以C#语言实现了算法和代码,由daode3056原创。"
详细说明:
1. **二元7次多项式路径规划**
- 该方法通过提高幂次(如7次)来增加路径的曲折性,以创建更加复杂的曲线。例如,一个简单的三次方程可以生成直线或轻微曲线,而7次方程则可以生成更多转折点。
- 方程的表达式包含8个参数,可以通过调整这些参数来改变曲线形状,实现不同路径的设计。
- 为了计算路径的斜率,需要进行一阶偏导数计算,这有助于理解曲线在各个点的行为,从而指导路径的生成。
- 在程序实现中,可以采用八邻域搜索策略,从左下角开始,沿着曲线方向生成路径。
2. **双螺旋线路径规划**
- 这种方法使用等间距的螺旋线来创建路径,其线积分可以通过数学公式确定。
- C#代码示例展示了如何根据给定参数生成螺旋线,并将其添加到路径列表中。
- 双螺旋线路径由两条相反方向的螺旋组成,增加了路径的多样性,适合于需要连续旋转的场景,如AGV的环绕移动。
3. **椭圆式双循环搜索路径**
- 椭圆式路径规划可能涉及到在一个椭圆区域内进行双循环搜索,通过改变椭圆的参数可以调整路径的复杂度和覆盖范围。
- 这种方法适用于需要在特定区域反复覆盖的机器人任务,如地面清洁或喷涂。
4. **π构成的对称路径**
- 利用无理数π的特性,可以构造出具有对称性的路径,这在某些美学或功能需求下非常有用。
- π的对称性可以用于创建美观且有序的路径,同时保持一定的随机性和复杂性。
这四种路径规划方案在实际应用中可以根据具体需求进行选择和组合,以适应不同的AGV导航和机器人作业环境。每种方法都有其独特的优点和适用场景,可以根据系统的限制和任务要求进行优化。例如,对于需要快速变化方向的AGV,高次多项式路径可能更合适;而对于需要覆盖整个工作区域的机器人,椭圆双循环搜索可能更为有效。
路径自动规划的四套方案
项道德(daode1212,daode3056) 撰
为 AGV 导航线路自动生成或机器人运行轨迹的自动生成,第一方案是从图像中生成一
笔画路径,方案二是通过方程生成,方程生成的可以是直角坐标系,也可以是极坐标系。
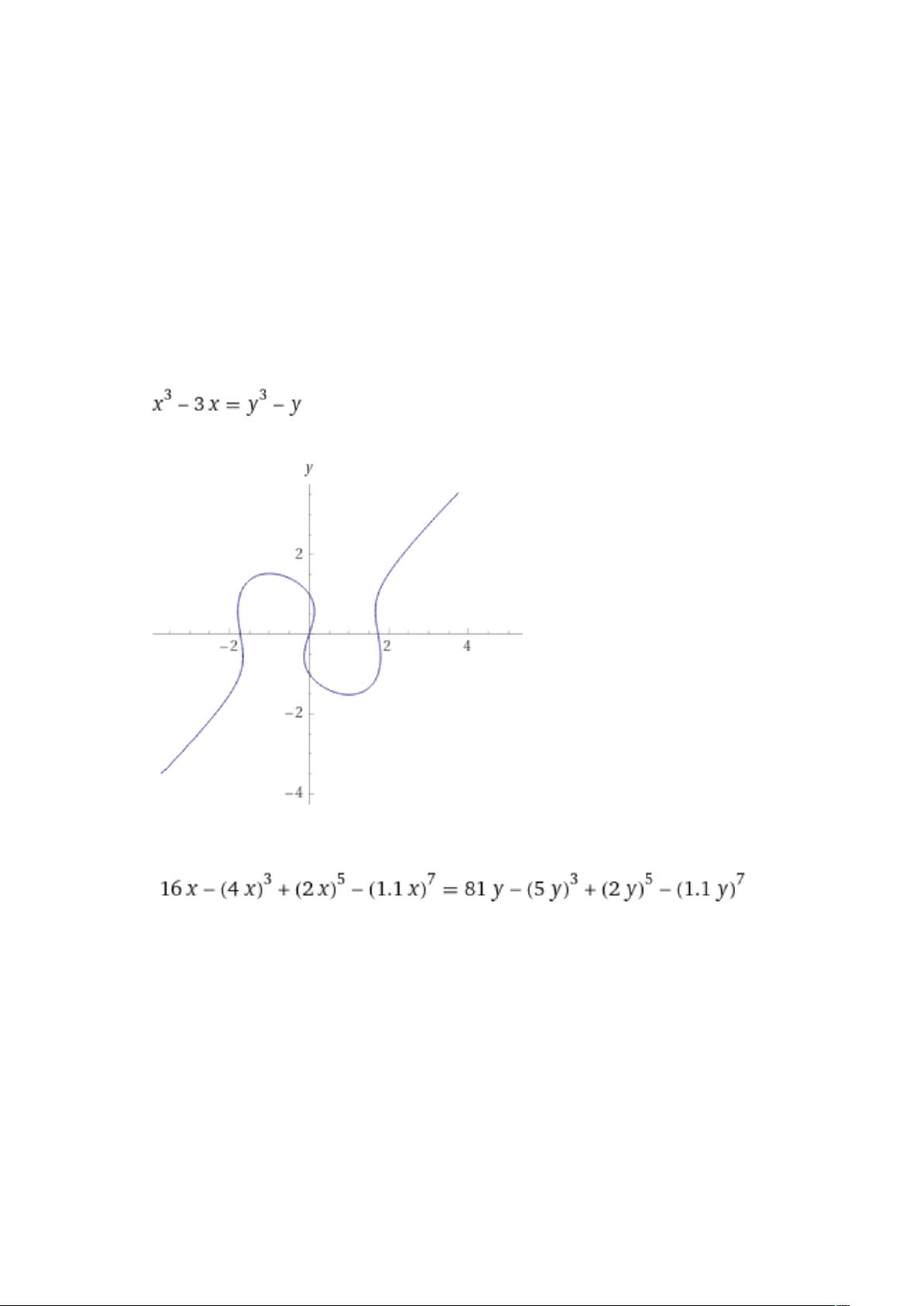
一,二元高次方程的线路规划
先从一个简单的三次方程看:
它的图像是:
为增加迂回弯曲的效果,要提高幂的次数,如使用 7 次幂:
表达式为:
生成的区间遍历线路是:
下载后可阅读完整内容,剩余8页未读,立即下载
2018-09-13 上传
2013-05-17 上传
2018-07-22 上传
2021-10-30 上传
2024-07-21 上传
2023-06-02 上传
2022-10-12 上传
2021-10-14 上传
2021-10-26 上传

daode3056
- 粉丝: 38
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
