FOC电机控制关键步骤与代码详解
需积分: 5 155 浏览量
更新于2024-06-27
4
收藏 747KB PDF 举报
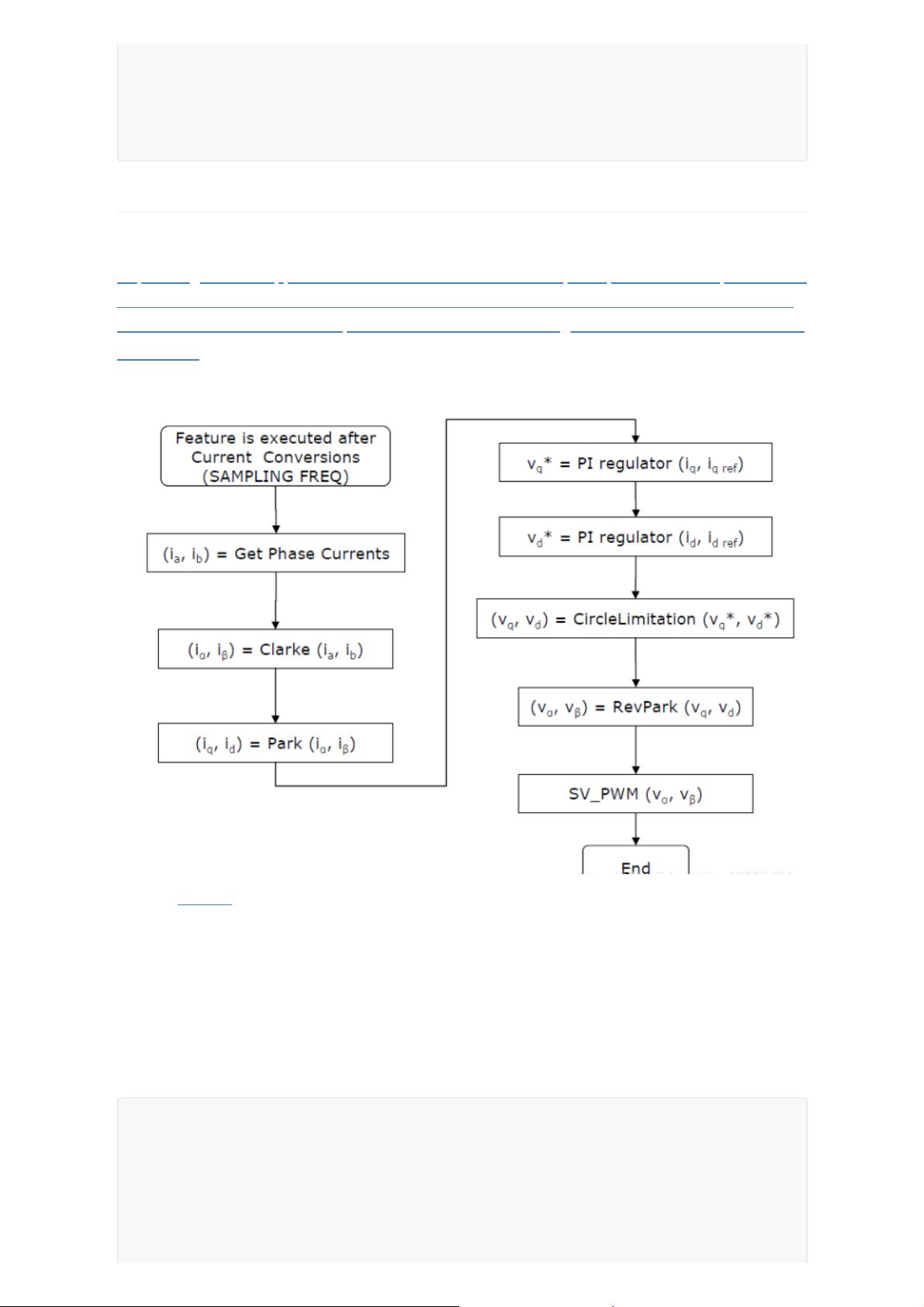
本文档主要探讨了Field-Oriented Control (FOC)电机控制原理的代码实现细节。FOC是一种高效的电机控制策略,它通过对电机磁场定向来提高控制精度和效率。以下是关键步骤的详细解析:
1. **机械角度到电角度转换**:
控制流程首先从获取机械角度(由编码器提供)开始,这个角度可能因编码器类型的不同而有所差异。函数`encoder_get_elec_angle`负责计算电动机的实际电角度,通常基于机械角度加上偏移量,并在中断处理程序中确保数据获取的准确性。
2. **三角函数计算优化**:
计算正弦(sin)和余弦(cos)值是FOC的重要步骤,用于后续的坐标变换。由于这些计算通常涉及到复杂的数学运算且耗时,为了提高效率,代码会预先计算一系列sin和cos值,并存储在一个数组中,通过查找表的方式来快速获取所需值,而不是实时计算。
3. **克拉克和Park变换**:
克拉克变换用于将三相电压信号转换为两相(α-β或d-q)表示,而Park变换则将α-β坐标系下的电流和电压转换到同步d-q坐标系,这是实现磁场定向的关键步骤。
4. **PID控制环路**:
有两个PID控制器分别负责速度环和电流环,它们接收参考速度、实际速度(编码器测量)以及PID调节器的输出,分别计算出理想电流(Iq_ref)和实际电流控制信号(Vq)。Id电流通常保持恒定,不做有用功。
5. **磁链限制**:
为了保护电机并确保控制系统的稳定性,需要实施磁链圆限制,防止磁链饱和。函数`rev_park_circle_limitation`实现了这一功能。
6. **Park变换逆过程**:
在完成某些操作后,需要反向进行Park变换,将d-q坐标系的电流和电压重新转换回α-β坐标系。
7. **扇区SPWM(正弦调制脉宽调制)计算**:
最后,根据处理后的控制信号,函数`calc_svpwm_duty_cycles`计算出对应于每个电磁铁的PWM duty cycle,这一步完成了实际的电机驱动信号生成。
这份代码解析展示了如何结合硬件接口、数学变换和PID控制算法来实现FOC电机控制的高效和精确。理解并熟练掌握这些步骤对于电机控制系统的开发者来说至关重要。
6.磁链圆的限制
相关博客的磁链圆介绍:
https://blog.csdn.net/qq_33233481/article/details/111473884?ops_request_misc=&request_id=&bi
z_id=102&utm_term=foc%E7%A3%81%E9%93%BE%E5%9C%86%E7%9A%84%E4%BD%9C%E7%9
4%A8&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduweb~default-0-111
473884.142
v32
pc_rank_34,185
v2
control&spm=1018.2226.3001.4187
磁链圆在整个foc的控制中处于的位置:
磁链圆在PID控制器之后,而PID控制器是单独对Vd,Vq进行PID控制的,所以为了使Vd,Vq合成的电
压矢量小于等于单位圆的边,即Vd² + Vq² ≤ MAX_MODULE²
其原理公式如下,若Vd,Vq合成的矢量大于圆的最大矢量,则将其乘以一个缩放倍数i²,使其等于圆的
最大矢量,i就是需要缩放的系数。
令 (vd² + vq² ) × i² = MAX_MODULE² ;
i = SQRT ( MAX_MODULE² / (vd² + vq²) );
其 目的是为了防止输出的Vd和Vq的合成矢量做限制
} else if (output < pPID->min_output) {
output = pPID->min_output;
}
return output;
}
static void rev_park_circle_limitation(FOC_t* pFOC)
{
int32_t temp;
temp = pFOC->Vq * pFOC->Vq + pFOC->Vd * pFOC->Vd;
if (temp > (uint32_t)((MAX_MODULE * MAX_MODULE))) {
剩余15页未读,继续阅读
660 浏览量
147 浏览量
278 浏览量
151 浏览量
1619 浏览量
253 浏览量
点击了解资源详情
4179 浏览量
124 浏览量

SXD_SJJ
- 粉丝: 5331
- 资源: 14
 我的内容管理
展开
我的内容管理
展开







最新资源
- swgoh-tw
- pictips:Instagram克隆与生活小贴士
- Bookers2-ver4.0
- 闪烁文本按钮、发光呼吸字体
- HTML和CSS
- CSCE4110:算法
- 超简单图示:建议的 FBMC 调制器的图示-matlab开发
- 基于51单片机智能电子锁多功能菜单栏
- MPMB-v13-content-catchup
- 海威视康扫码读取软件源码C++BuilderSocket通讯.zip
- FinalShell(远程连接工具) V3.0.10 官方版.rar
- portfolio
- (MFC)手机通讯录 (源码和文档)
- mimic_mf_analysis:Python应用程序可运行MIMIC表型的相互信息分析
- sgauss(t,Tfwhm,E,C,m):啁啾超高斯脉冲-matlab开发
- GuitarTabs:绘制吉他谱的工具
