HCS12单片机驱动的智能车控制系统
需积分: 9 86 浏览量
更新于2024-10-22
收藏 87KB DOC 举报
"基于单片机的智能小车"
在本文中,我们探讨了基于HCS12单片机设计的智能小车控制系统,该系统主要用于实现小车的自动寻迹和多功能操作。智能小车系统结合了多学科技术,如控制理论、模式识别、传感器技术、电子学、电气工程、计算机科学以及机械工程。它的核心功能包括路径识别、角度控制和车速控制,目标是在白色场地上的黑色引导线内自主行驶。
硬件系统中,路径识别的关键在于红外光电传感器,它们负责检测小车前方的路况。而车速控制则通过模糊控制器来实现,确保小车能够根据环境变化及时调整速度。在系统分析部分,智能车系统需要根据实时路况信息,比如进入弯道或遇到十字路口,来调整转向舵机和直流驱动电机,确保小车稳定、快速地沿设定路线行驶。
在控制方案设计上,转向角控制是通过输入脉宽调制(PWM)信号进行开环控制。根据检测到的赛道位置,通过预设的控制表给出不同舵机PWM信号,使小车转向相应角度。舵机的转向角与PWM信号的占空比有近似线性关系,因此采用查表法可以简化控制逻辑。
另一方面,小车速度控制采用了参数自整定的模糊控制算法,实现闭环控制。根据路况,模糊控制器会调整速度给定值,通过实时反馈小车的角度变化率,动态调整模糊规则,优化控制性能,减少响应时间并减小稳态误差。
总结来说,这个基于HCS12单片机的智能小车系统展现了微控制器在自动化控制领域的应用,它利用红外传感器进行路径识别,模糊控制算法实现速度控制,从而实现智能小车的自主导航。这样的设计不仅提高了小车的行驶稳定性,还增强了其适应复杂环境的能力。
基于 HCS12 的小车智能控制系统设计,智能车,HCS12,单片机,红外光电传感器
2007-10-01 21:01
智能车系统以迅猛发展的汽车电子为背景,涵盖了控制、模式识别、传感技术、电子、电
气、计算机、机械等多个学科;主要由路径识别、角度控制及车速控制等功能模块组成。一般
而言,智能车系统要求小车在白色的场地上,通过控制小车的转向角和车速,使小车能自动地
沿着一条任意给定的黑色带状引导线行驶。 笔者基于 HCS12 单片机设计了一种智能车系统。
硬件系统中的路径识别功能由红外光电传感器实现,车速控制由模糊控制器进行调节。软
件设计中实时检测路况,并定时中断采集速度反馈值。
1 系统分析及控制方案
1.1 智能车系统分析
智能车系统根据检测到的路况和车速的当前信息,控制转向舵机和直流驱动电机,相应地调整
小车的行驶方向和速度;最终的目的是使智能车能快速、稳定地按给定的黑色引导线行驶。
小车在行驶过程中会遇到以下两种路况:①当小车由直道高速进入弯道时,转角方向和车速应
根据弯道的曲率迅速做出相应的改变,原则是弯道曲率越大则方向变化角度越大,车速越低。
②当小车遇到十字交叉路段或是脱离轨迹等特殊情况时,智能车应当保持与上次正常情况一致
的方向行驶,速度则相应降低。因此,对智能车的设计,要求具有实时路径检测功能和良好的
调速功能。
1.2 控制方案的设计
系统的控制分为小车转向角控制和速度控制两部分。
小车转向角的控制通过输入 PWM 信号进行开环控制。根据检测的不同路径,判断出小车所在
位置,按不同的区间给出不同的舵机 PWM 控制信号,小车转过相应的角度。考虑到实际舵机
的转向角与所给 PWM 信号的占空比基本成线性关系,所以舵机的控制方案采用查表法。在程
序中预先创建控制表,路径识别单元检测当前的路况,单片机通过查表可知当前的赛道,然后
给出相应的 PWM 信号控制舵机转向。
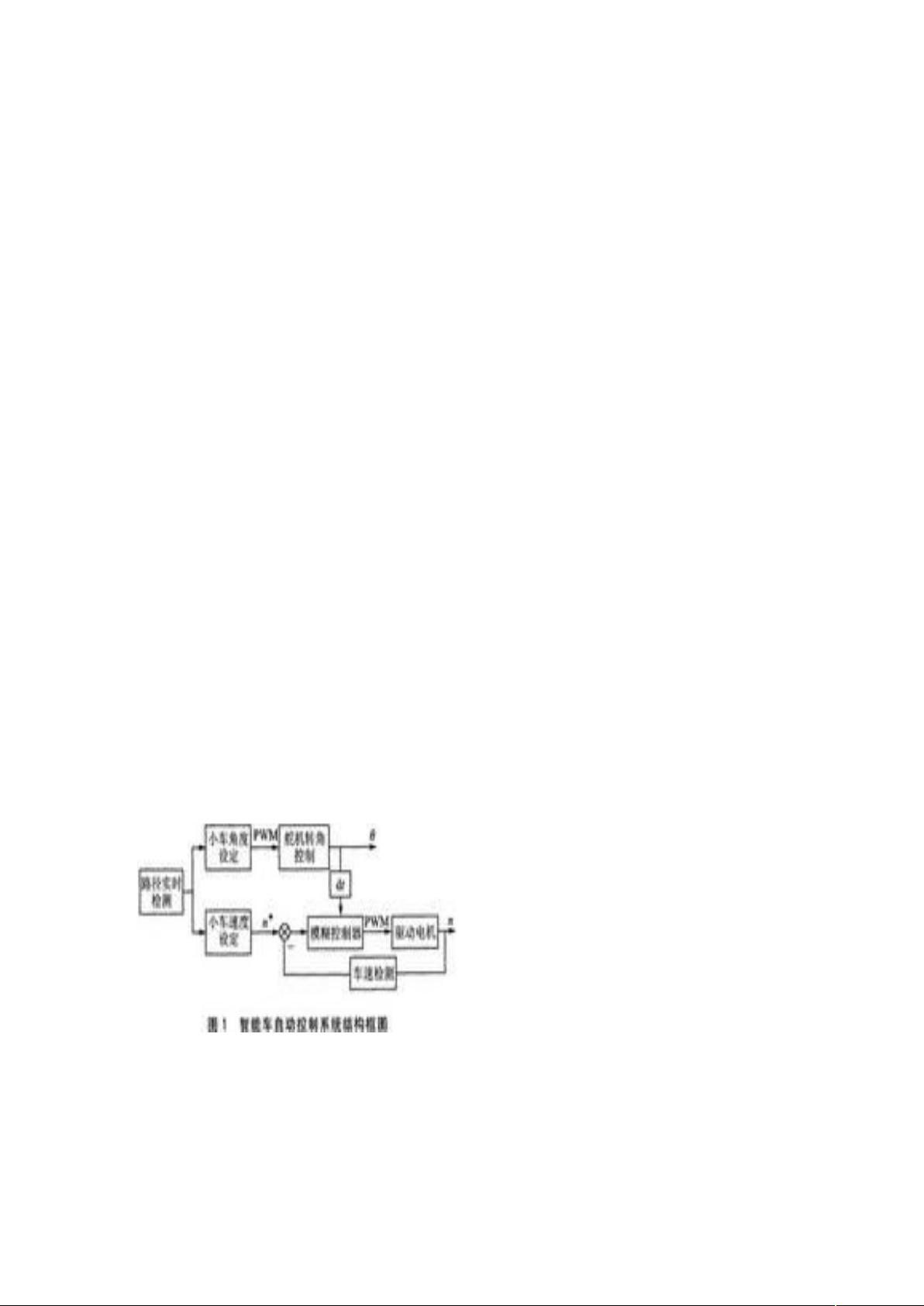
本设计采用了一种参数自整定的模糊控制算法对小车速度进行闭环控制。小车在前进过程中,
根据不同的路况给出不同的速度给定值,通过模糊控制器进行速度调节,以缩短小车的速度控
制响应时问,减小稳态误差。系统将小车的角度变化率反馈给模糊控制器,通过修正规则进行
模糊参数的自整定。智能车自动控制系统结构框图如图 1 所示,图中 dt 表示小车角度的微分环
节,θ 表示输出的转角,n*表示速度的设定值,n 表示实际速度反馈值。
2 硬件结构与方案设计
系统硬件主要由 HCSl2 控制核心、电源管理单元、路径识别单元、角度控制单元和车速控制
单元组成,其结构框图如图 2 所示。
(图 2 暂缺)
2.1 HCSl2 控制核心
下载后可阅读完整内容,剩余4页未读,立即下载
777 浏览量
2023-08-29 上传
143 浏览量
2023-07-03 上传
2022-12-23 上传
2021-10-12 上传
2023-06-24 上传

jjjj5
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现影片压缩技术解析
- Duilib文件选择示例深入解析
- LeagueSharp 大会:深入C#编程交流
- 深入理解Spring Boot:基础知识与构建基石
- MATLAB无限循环运行程序直到按键结束操作教程
- STM32CubeMX 5.1.0:微控制器配置与代码生成工具
- TAC项目文档:物联网技术与教育资源共享
- Fiblary Python模块:简化Fibaro Home Center REST API操作
- ttyplot:终端实时数据绘图工具
- 2-16进制转换算法实验简易教程
- MATLAB中不清除命令窗口的ASCII进度条实现
- 全面支持WSLD开发的SoapUI开发包
- React Redux教程核心文件详解
- iOS数据持久化方案性能对比研究
- Raize.v5.5压缩包下载与软件介绍
- Shell脚本实践:文件管理与图像转换技巧
