Python实现代客泊车AVP算法详解及Demo
需积分: 5 25 浏览量
更新于2024-08-03
收藏 668KB PDF 举报
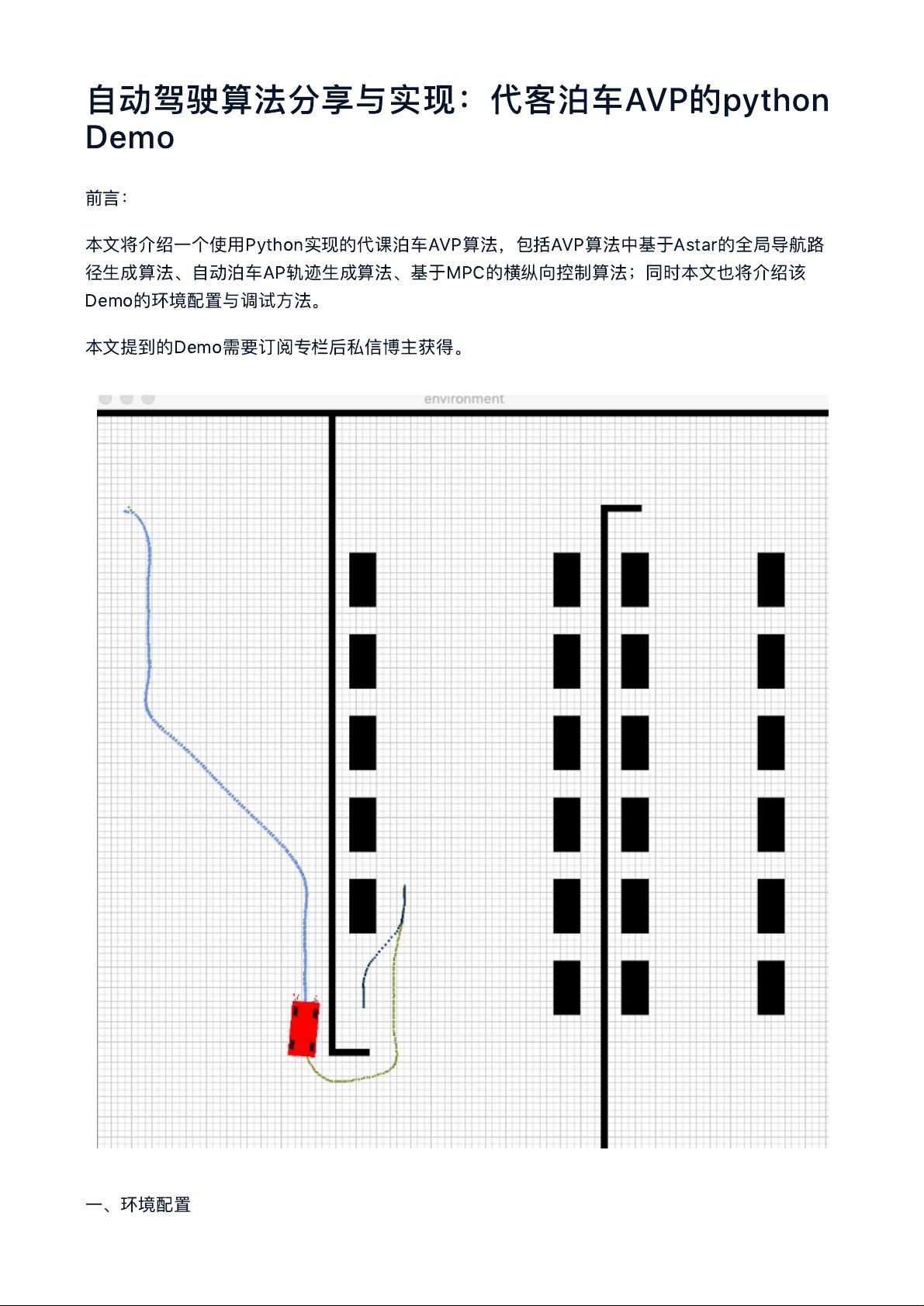
"本文档主要分享了自动驾驶领域中的代客泊车(AVP)算法的Python实现,涵盖了全局路径规划、自动泊车轨迹生成以及车辆控制等关键环节,并提供了环境配置和调试方法。"
在自动驾驶技术中,代客泊车(Automatic Valet Parking,简称AVP)是一项重要的应用,允许车辆在无需驾驶员操作的情况下自动停入或驶出停车位。这份文档通过Python演示了一个AVP系统的实现,旨在帮助读者理解相关算法并进行实践。
首先,文档介绍了基于A*算法的全局导航路径规划。A*算法是一种广泛应用的搜索算法,用于在复杂的环境中找到从起点到终点的最优路径。在AVP场景下,这个算法需要考虑车辆的动态特性、地图信息(如停车位位置、墙壁、障碍物等)以及实时感知数据,生成一条安全、高效的路径。
其次,文档涉及自动泊车(Automatic Parking,简称AP)轨迹生成算法。在确定了全局路径后,这一阶段的算法会生成更加精确的泊车轨迹,确保车辆能准确无误地停入停车位。轨迹生成可能基于模型预测控制(Model Predictive Control,MPC),这是一种优化控制策略,能够考虑到系统动态和约束,生成满足目标的控制序列。
然后,文档提到了基于MPC的横纵向控制算法。MPC在自动驾驶控制系统中有着广泛的应用,它能够处理多输入多输出系统,并实时调整车辆的横向(转向)和纵向(加速/刹车)运动,确保车辆按照预定轨迹行驶,并且考虑到舒适性和安全性。
在环境配置方面,文档指出需要Python 3.6环境,并列出了必要的依赖包,如numpy、opencv-python、scipy等,这些是处理数学计算、图像处理和优化问题的常用库。特别地,opencv-python的安装推荐使用conda环境,以避免可能出现的问题。
调试方法部分,文档给出了四个步骤:改变停车位编号、调整起点位置、修改障碍物坐标以及调整墙壁坐标。这有助于读者在模拟环境中测试和优化算法,理解不同参数对AVP系统性能的影响。
这份资料为学习和研究自动驾驶代客泊车算法提供了一个实用的Python实现示例,涵盖了从路径规划到车辆控制的关键技术,并提供了实际操作的指导,对于希望深入理解AVP系统的开发者或研究人员来说极具价值。
⾃
动
驾驶
算
法
分
享
与
实
现
:
代
客
泊
⻋
A
V
P
的
pyt
h
o
n
D
em
o
前
⾔
:
本
⽂
将
介
绍
⼀个
使
⽤
P
yt
h
o
n
实
现
的
代
课
泊
⻋
A
V
P
算
法
,
包
括
A
V
P
算
法
中
基
于
A
st
a
r
的
全
局导
航
路
径
⽣
成
算
法
、
⾃
动
泊
⻋
AP
轨
迹
⽣
成
算
法
、
基
于
MPC
的
横
纵
向
控
制
算
法
;
同
时本
⽂
也
将
介
绍
该
D
em
o
的
环
境
配
置
与
调试
⽅
法
。
本
⽂提
到
的
D
em
o
需
要订
阅
专
栏
后
私
信
博
主
获
得
。
⼀
、
环
境
配
置
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-02 上传
2021-07-02 上传
2023-12-22 上传
2019-10-14 上传
2019-10-14 上传
2019-10-14 上传

自动驾驶Player
- 粉丝: 2255
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python库 | slick_webdriver-1.0.51-py3-none-any.whl
- NRDFReactor-开源
- 易语言超级列表框操作源码-易语言
- Hoja-de-Trabajo-5:Hoja-de-Trabajo 5 2 ejercicios
- OOP-Java:Java语言nesneseyönelimprogramlama olarak gruparkadaşımileyapmışolduğumuzdönemprojesi
- Service.Liquidity.Converter
- reading-notes:实时网址
- genius-starter-files
- 易语言API拖放功能源码-易语言
- spyasuda.github.io:以工作项目组合为特色的专业网站
- brainsatplay.github.io:我们的Brains @ Play前端网站
- 0559、数字电子技术基础实验指导书.rar
- IMU_Calibration
- UltraNice.tsr9pfc273.gaspCeI
- Edustack
- man子手
