并联六自由度机构动力学建模:Kane方法与MATLAB仿真
需积分: 50 14 浏览量
更新于2024-08-10
2
收藏 332KB PDF 举报
"基于KANE方法的并联六自由度机构的动力学计算 (2011年)"
这篇2011年的论文聚焦于使用Kane方法对六自由度并联机构进行动力学建模。Kane方法是一种在多体系统动力学中广泛应用的分析工具,它避免了传统牛顿-欧拉法和拉格朗日法中可能出现的理想约束力问题,减少了未知变量的数量,使得动力学模型的建立更为简洁。
并联六自由度机构是一种复杂的机械结构,由两根导轨、六个滑块、六根连杆和一个动平台构成。这种机构常被用于模拟运动、对接操作、承载运动和精密加工等领域。尽管这类机构在1965年由Stewart首次提出,但中国在这方面的研究相对较晚,且与发达国家相比存在差距。
论文的核心贡献在于将Kane方法应用到实际机构的简化模型上,通过建立滑块驱动力与动平台运动规律之间的数学模型,为优化六自由度并联机构提供了理论基础。作者使用MATLAB软件进行编程计算,得到的结果与ADAMS(Automatic Dynamic Analysis of Mechanical Systems)软件的动力学仿真结果高度一致。ADAMS是一款广泛使用的多体系统动力学仿真软件,其准确性和可靠性已得到业界认可。
Kane方法的运用包括定义运动方程和约束方程,通过这些方程可以求解出系统的动力学特性,如速度、加速度以及作用力。这种方法对于理解并联机构的动态行为至关重要,有助于设计者优化机构的性能,如减少振动、提高精度和效率。
此外,论文还指出,六自由度并联机构的研究是当前技术发展的热点,特别是在运动模拟领域,相关的理论研究亟待加强。通过Kane方法的深入研究,可以为并联机构的设计、控制策略以及实时仿真提供有力支持,推动中国在这一领域的技术进步。
关键词涉及Kane方法、并联机构、动力学和仿真,表明这篇论文是自然科学领域的学术论文,主要探讨了多体系统动力学在并联机构中的具体应用。该研究对于从事机器人、机械工程以及仿真技术研究的学者和技术人员具有很高的参考价值。
第
28
卷增刊
2011
年
4
月
计算力学学报
飞
'0
1.
28
,
Sup.
Chinese
Journal
of
Computational
Mechanics
April2010
文章编号
1007-4708(2011)Sup-0165-06
基于
KANE
方法的并联六自由度机构的动力学计算
赵海峰\
案开林
(重庆大学工程力学系,重庆
400044)
摘
要
z
将
Kane
方法运用于六自由度并联机构的动力学建模,在对实际机构进行简化的基础上,建立了滑块
驱动力与动平台运动规律之间的数学模型。利用
MATLAB
软件进行编程计算,所得结果与
ADAMS
软件动力
学仿真的结果十分相近,从而为优化六自由度并联机构提供了基础。
关键词
Kane
方法;并联机构;动力学;仿真
中图分类号
THl13.2
文献标志码
A
l
引
新型并联六自由度机构其结构原型是
1965
年
德国科学家
Stewart
发明的
6-6
型
Stewart
平台机构。
经过数十年的发展,现在主要用于模拟运动、对接
动作、承载运动、金属切割加工等方面。目前,世
界上研制大型并联机构的国家较多,早期研制的多
自由度运动平台主要用于军事目的。我国对并联运
动平台的研究起步较晚,目前和美国、德国等发达
国家相比尚有较大差距,因此在并联运动机构的研
究方面、尤其是用于运动模拟的并联运动平台的相
关理论研究急待提高
[1
气
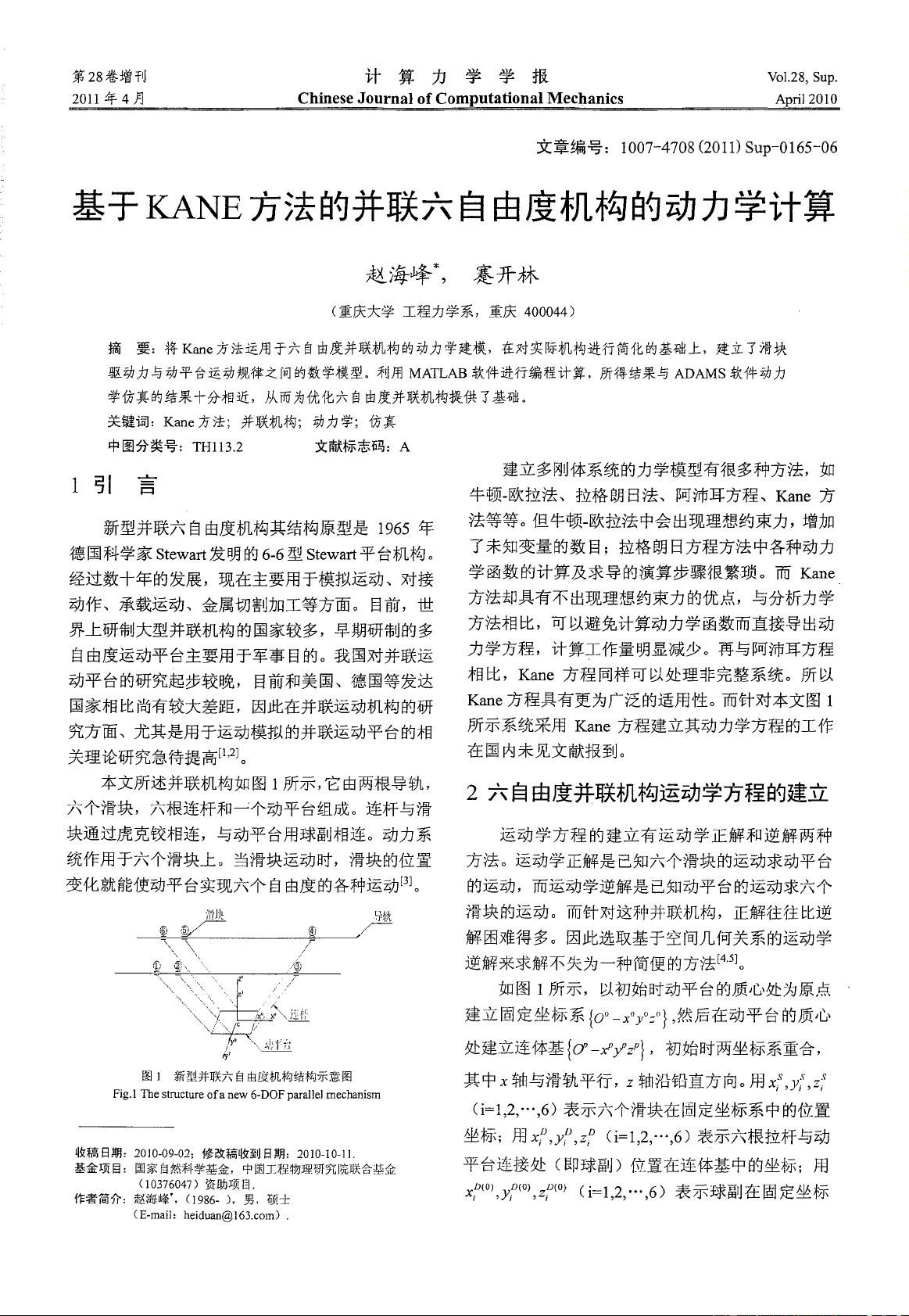
本文所述井联机构如图
l
所示,它由两根导轨,
六个滑块,六根连杆和一个动平台组成。连杆与滑
块通过虎克校相连,与动平台用球副相连。动力系
统作用于六个滑块上。当滑块运动时,滑块的位置
变化就能使动平台实现六个自由度的各种运动
[3]
。
⑤鸟
/jlli
\
④
/
图
l
新型并联六自由皮机构结构示意图
Fig
.l
Th
e structure
ofa
new 6-DOF paralleJ mechanism
收稿日期
2010-09-02
;修改稿收到日期
2010-10-11
基金项目.国家自然科学基金,中国工程物理研究院联合基金
(
1037604
7)资助项目.
作者简介:赵海峰.
(1986-)
,男,硕士
CE-mail: heiduan@163.com)
建立多刚体系统的力学模型有很多种方法,如
牛顿-欧拉法、拉格朗日法、阿沛耳方程、
Kane
方
法等等。但牛顿-欧拉法中会出现理想约束力,增加
了未知变量的数目:拉格朗日方程方法中各种动力
学函数的计算及求导的演算步骤很繁琐。而
Kane
方法却具有不出现理想约束力的优点,与分析力学
方法相比,可以避免计算动力学函数而直接导出动
力学方程,计算工作量明显减少。再与阿沛耳方程
相比,
Kane
方程同样可以处理非完整系统。所以
Kane
方程具有更为广泛的适用性。而针对本文图
l
所示系统采用
Kane
方程建立其动力学方程的工作
在国内未见文献报到。
2
六自由度并联机构运动学方程的建立
运动学方程的建立有运动学正解和逆解两种
方法。运动学正解是己知六个滑块的运动求动平台
的运动,而运动学逆解是己知动平台的运动求六个
滑块的运动。而针对这种并联机构,正解往往比逆
解困难得多。因此选取基于空间几何关系的运动学
逆解来求解不失为一种简便的方法[归
4.5
叫
.5
匀
5
勾]
如图
1
所示,以初始时动平台的质心处为原点
建立固定坐标系
{Oo
-x
γ
斗,然后在动平台的质心
处建立连体基
(σ
-
x"
ÿzp}
,
初始时两坐标系重合,
其中
x
轴与滑轨平行
,
z
轴沿铅直方向。用
xfJJ'
,
zf
C
i=1
,
2
,…,
6)
表示六个滑块在固定坐标系中的位置
坐标;用
X
j
飞
yfJ
,
zf(i=1
,
2
,…,
6)
表示六根拉杆与动
平台连接处(即球副)位置在连体基中的坐标:用
xf(
飞
y
户。)
,
z{
冽的
C
i=1
,
2
,…,
6)
表示球副在固定坐标
下载后可阅读完整内容,剩余5页未读,立即下载
相关推荐



weixin_38659374
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开








最新资源
- 按键精灵Quick Macro V8.00.6874免费版发布
- 轻松配置ibatis自动生成功能
- Hadoop 2.7.4在Windows 7 64位系统下编译指南
- 戴尔服务器PRECS130RD卡驱动在Win7/Win2008R2中的应用
- CSS3实现层叠文字放大缩小动画效果
- Python实现TensorFlow源码深度学习教程
- ASP.NET网上书店系统的开发与应用
- SQL Server语句优化利器 - Registar_LECCO_SQL_Expert_v25
- 基于DSP实现单相逆变SPWM波形输出技术
- Delphi开发ASP组件实现高效多文件上传功能
- 掌握StarUML:轻松使用UML工具解压模块
- 全面解析silicon FM USB收音机全套资料
- 档案管理系统开发设计与实现需求分析
- ARM架构下Fabric1.4.x的Docker镜像源包下载与使用指南
- Yeoman 生成器简化GenJS项目搭建流程
- 全新V2.0版一键复制粘贴工具体验
