ARM Power State Coordination Interface (PSCI)规格草案:协调平台电源状态
需积分: 0 184 浏览量
更新于2024-06-27
收藏 1.69MB PDF 举报
DEN0022E-Power-State-Coordination-Interface (PSCI) 是 Arm 公司制定的一份平台设计文档,旨在协调基于 Arm 架构的系统中的电源管理状态。这份工程草案版本是非保密的 Beta 版本,目的是从 Arm 合作伙伴和内部获取反馈,以便根据反馈进行调整。文档涵盖了版权信息、文档许可、引用、术语和缩略语、反馈机制、逐步术语承诺、假设与推荐以及 PSCI 的核心概念。
PSCI 的主要目标是确保在不同安全级别(如 Armv7 的特权级别)下,系统的软件堆栈能够有效地管理电源状态,包括但不限于唤醒、休眠和低功耗模式。它特别关注于处理系统级的电源管理协调,如在虚拟化环境中的应用,以及跨多个安全域(Realms)的权力策略。
文档详细描述了以下关键部分:
1. **版权和文档使用**:
- 文档受版权保护,Arm 或其关联公司保留所有权利。
- 提供了 Arm 非保密文档许可条款,规定了使用此文档的条件。
2. **文档结构**:
- 引用列表提供了相关参考文献。
- 定义了术语和缩写,以便读者理解专业术语。
3. **获取反馈**:
- 邀请 Arm 合作伙伴和内部团队提供对文档的反馈,以便进行后续的改进。
4. **PSCI 功能与应用场景**:
- PSCI 主要用于处理系统进入和退出不同电源状态的过程,包括管理设备的休眠和唤醒,特别是在虚拟化环境中,它需要确保各个安全域之间的协调。
- 详细的使用案例(如 idle management)被提出,以明确功能需求和预期行为。
5. **安全等级与特权控制**:
- PSCI 被设计为在不同的异常级别(Exception levels)上运行,其中 Armv7 的特权级别起着关键作用,确保在最高特权级别下执行电源管理任务。
6. **软件堆栈和硬件接口**:
- 描述了在 Arm 基础架构上的软件栈如何与 PSCI 接口交互,以及如何通过称为"conduits"的机制实现电源管理的通信。
7. **安全世界软件与电源管理**:
- 着重强调了在安全世界(Secure World)中的软件如何利用 PSCI 来实施严格的电源管理策略,以保证系统安全。
DEN0022E-Power-State-Coordination-Interface 是一个重要的技术文档,它定义了 Arm 平台上的电源管理接口标准,确保在多特权级和安全环境下,系统的高效能和安全性得到优化。通过反馈机制,该文档旨在不断迭代和完善,以适应不断发展的硬件和软件需求。

Power State Coordination Interface
Page 15 of 92 Copyright © 2012, 2013, 2015, 2017 - 2022 Arm Limited or its affiliates. All rights reserved. DEN0022E
Non-Confidential
Assumptions and recommendations
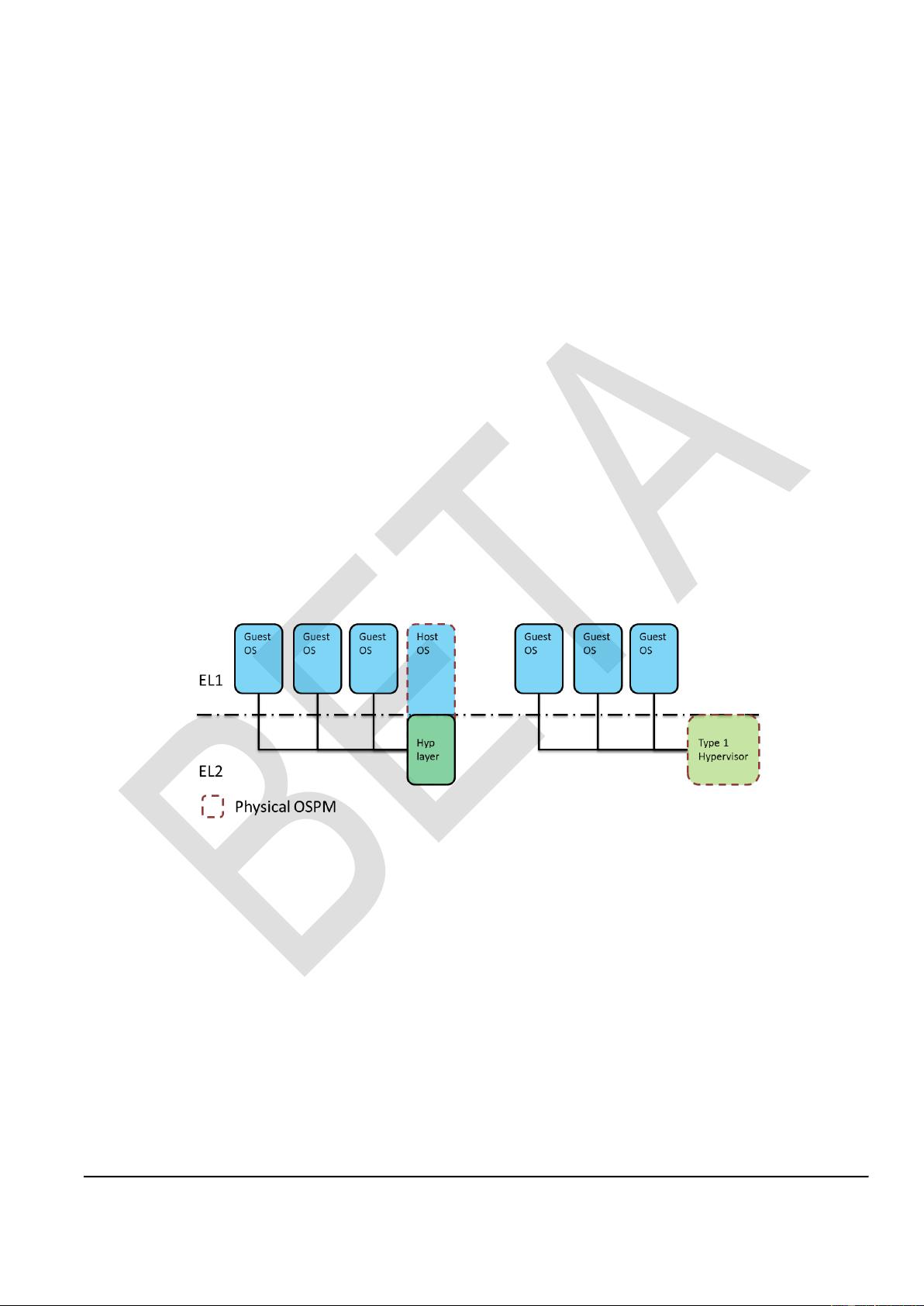
This document defines an API that can be used to coordinate power control among supervisory
systems concurrently running on a device. As the following sections explain, the API allows a
supervisory system to request cores to be powered up or down, and to request context transfer of
secure context from one core to another, which might be needed when dealing with trusted OSs or SPs.
Throughout the description, the document generally assumes that EL2 and EL3 are both implemented,
but also covers other cases.
3.1 PSCI intended use
PSCI has the following intended uses:
• Provides a generic interface that supervisory software can use to manage power in the following
situations:
• Core idle management.
• Dynamic addition of cores to and removal of cores from the system, often referred to as
hotplug.
• Secondary core boot.
• Moving trusted OS context from one core to another.
• System shutdown and reset.
• Provides an interface that supervisory software can use in conjunction with Firmware Table (FDT
and ACPI) descriptions to support the generalization of power management code.
PSCI does not cover:
• Peripheral idle management. PSCI only applies to idle management of the cores used by the central
scheduler of supervisory software.
• Dynamic Voltage and Frequency Scaling. PSCI does not provide interfaces for the management of
core clock frequencies on a device.
PSCI does not provide power state representations to supervisory software. However, it is designed so
that it can also be used with hardware description technologies such as ACPI or FDT.
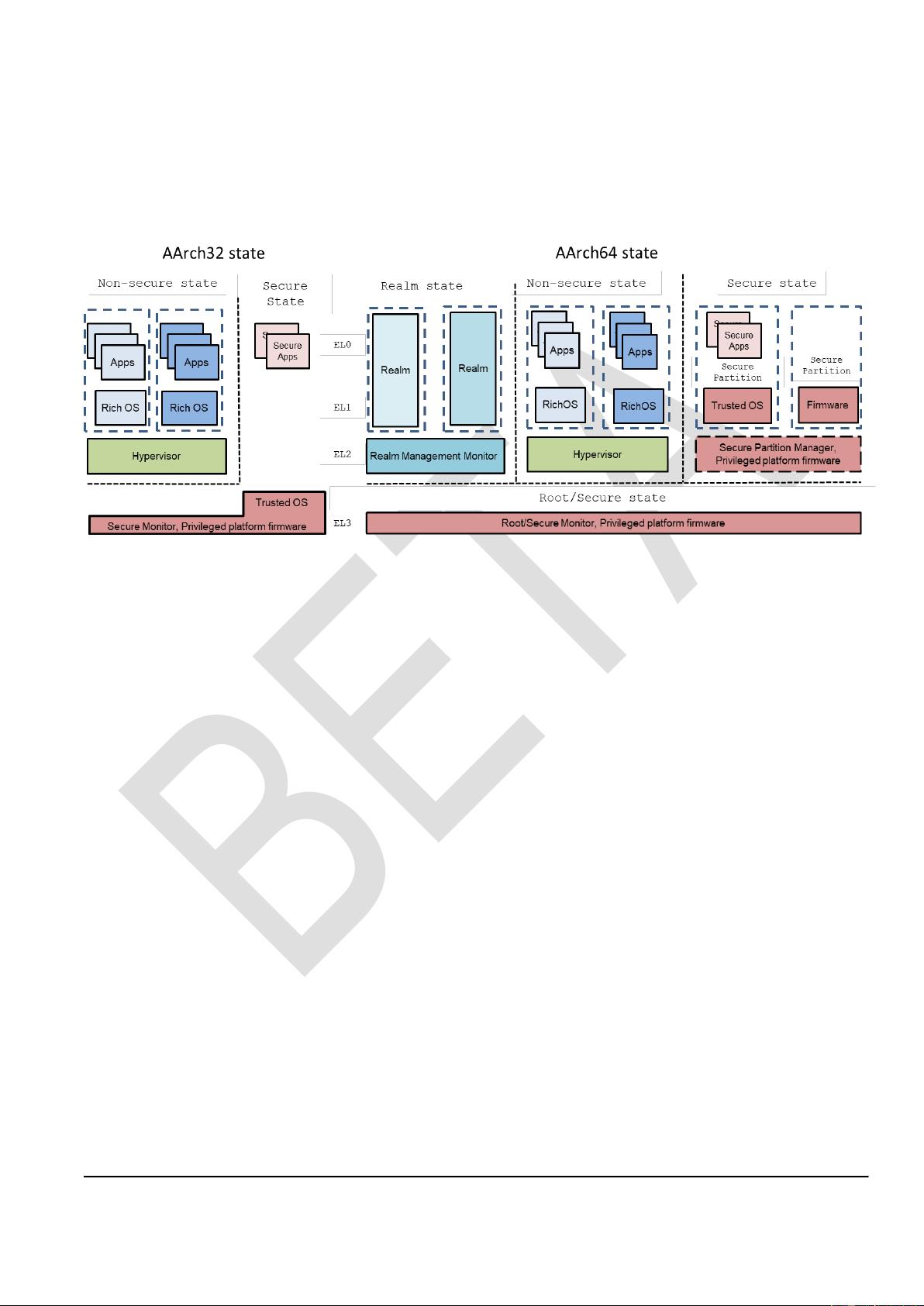
3.2 Exception levels, the Armv7 privilege levels, and highest privilege
Armv8 introduces explicit Exception levels that also define the software execution privilege hierarchy
within a Security state. An increase in Exception level, for example from EL0 to EL1, corresponds to an
increase in execution privilege.
In Armv7, the Exception level hierarchy is implicit in the architecture:
• The Virtualization Extensions provide the EL2 functionality. This is present only in Non-secure state.
• The Security Extensions provide the EL3 functionality, including the support for two Security states.
The control features of this functionality are provided by a Monitor mode that is present only in
Secure state.
The Armv7 architecture [1] uses Privilege levels (PLs) to describe the software execution privilege
hierarchy. Because Monitor mode was defined as a peer of the other Secure state privileged processor


剩余91页未读,继续阅读
2020-07-21 上传
2023-05-31 上传
2023-05-15 上传
2023-04-04 上传
2024-01-02 上传
2024-06-09 上传
2024-06-22 上传
2024-07-05 上传
2024-08-21 上传

TrustZone_Hcoco
- 粉丝: 2w+
- 资源: 32
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多功能HTML网站模板:手机电脑适配与前端源码
- echarts实战:构建多组与堆叠条形图可视化模板
- openEuler 22.03 LTS专用openssh rpm包安装指南
- H992响应式前端网页模板源码包
- Golang标准库深度解析与实践方案
- C语言版本gRPC框架支持多语言开发教程
- H397响应式前端网站模板源码下载
- 资产配置方案:优化资源与风险管理的关键计划
- PHP宾馆管理系统(毕设)完整项目源码下载
- 中小企业电子发票应用与管理解决方案
- 多设备自适应网页源码模板下载
- 移动端H5模板源码,自适应响应式网页设计
- 探索轻量级可定制软件框架及其Http服务器特性
- Python网站爬虫代码资源压缩包
- iOS App唯一标识符获取方案的策略与实施
- 百度地图SDK2.7开发的找厕所应用源代码分享
