3D图形中的求交测试与碰撞检测
"3D碰撞检测是计算机图形学中的一个重要概念,主要涉及到求交测试方法。浙江大学的金小刚在课件中详细讲解了这一主题,包括光线跟踪、视域四棱锥裁剪以及基于层次包围盒的拾取策略等。求交测试不仅用于物体拾取,还用于碰撞判断和光线追踪等应用。它通常被视作图形流水线中的应用层任务。"
在计算机图形学中,3D碰撞检测是一个关键的技术,它涉及到多个方面。首先,求交测试是判断两个或多个3D对象是否在空间中有重叠的基本手段,这在游戏开发、虚拟现实、机械设计等领域都有广泛应用。例如,用户通过鼠标点击屏幕上的物体进行物体拾取时,就需要进行求交测试来确定点击的目标。
OpenGL提供了拾取机制,它通过在较小的拾取窗口中绘制所有物体,并返回每个物体的z深度值,以便进行物体选择。虽然这种方法可以拾取点、线和面,但它并不直接提供高效的碰撞检测。相比之下,直接的求交测试,如光线与三角形的求交,不仅更快,还能计算出交点的详细信息,如位置、法向量和纹理坐标,且不受具体API限制。
视域四棱锥裁剪是一种优化技术,用于快速剔除不在观察视野内的物体,减少不必要的计算。通过对物体的包围盒与视域四棱锥进行比较,可以判断物体是否完全在视野内、完全在外或部分在内,从而决定是否需要进一步处理。
基于层次包围盒的拾取方法是另一种优化策略,它利用包围盒构建的层次结构,通过递归测试光线与包围盒的交集来快速定位目标物体。如果光线与包围盒无交,就可以跳过相应的子树,显著提高了效率。
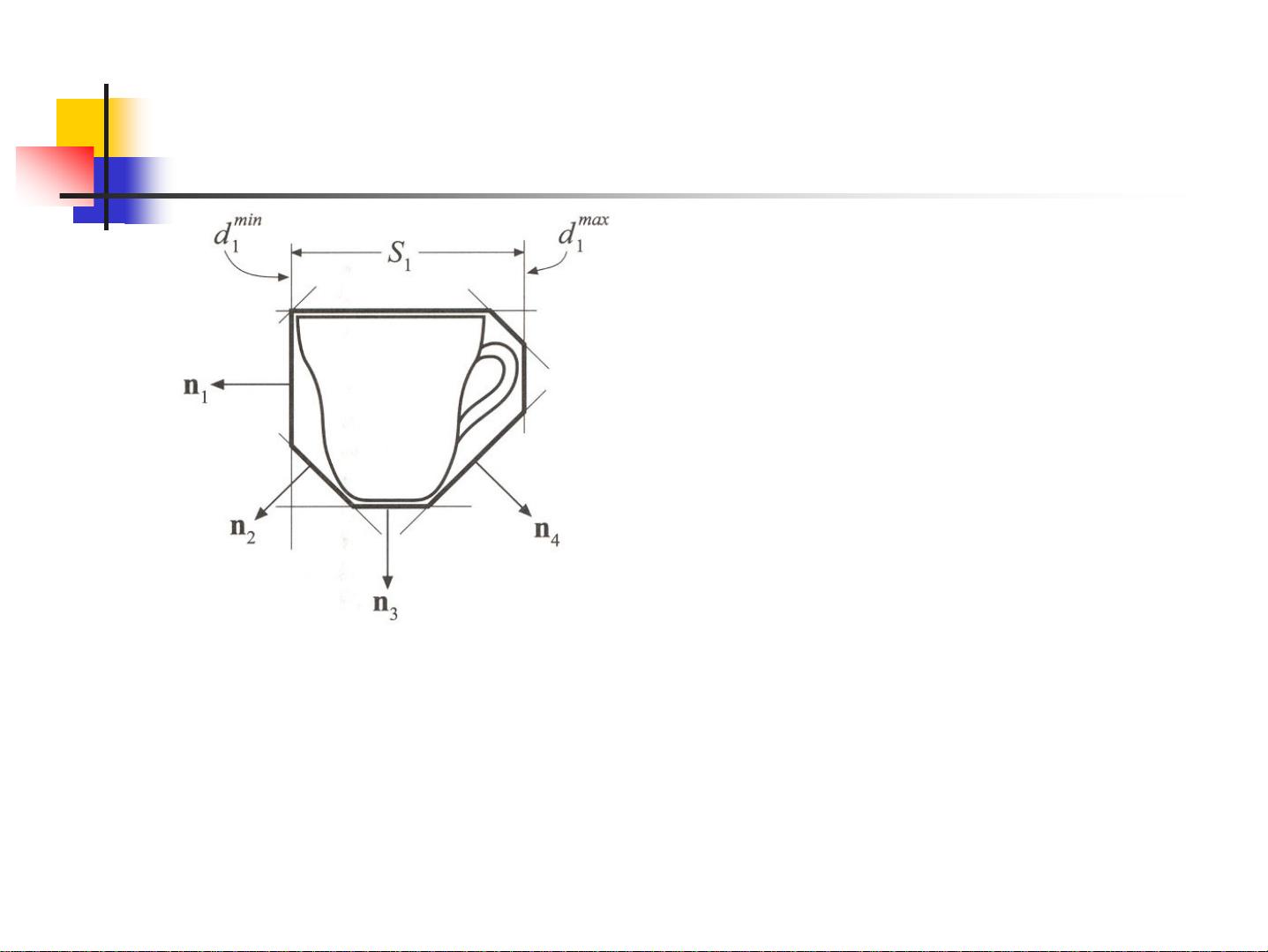
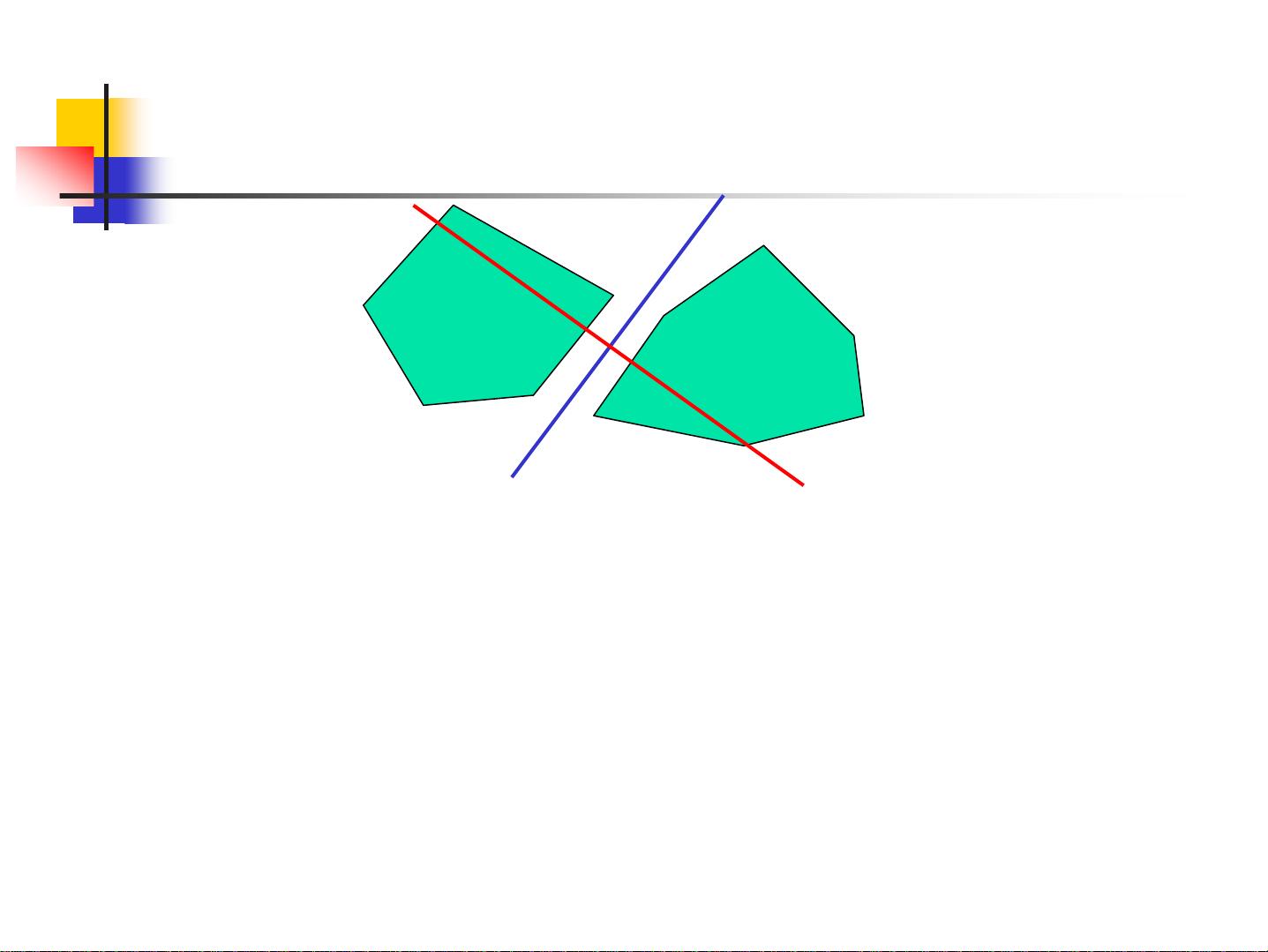
碰撞检测算法通常涉及多种图元类型,如三角形、球体、轴对齐包围盒(AABB)、有向包围盒(OBB)和离散有向多面体(k-DOP)等。这些图元的不同组合和碰撞情况,决定了求交测试的复杂性和结果的多样性,如是否相交、完全包含、完全分离或部分相交,并可能提供精确的相交位置、距离等信息。
3D碰撞检测和求交测试是计算机图形学中的核心算法,它们在游戏、模拟、可视化等众多领域发挥着重要作用。理解和掌握这些技术,对于进行高效、精确的3D图形处理至关重要。
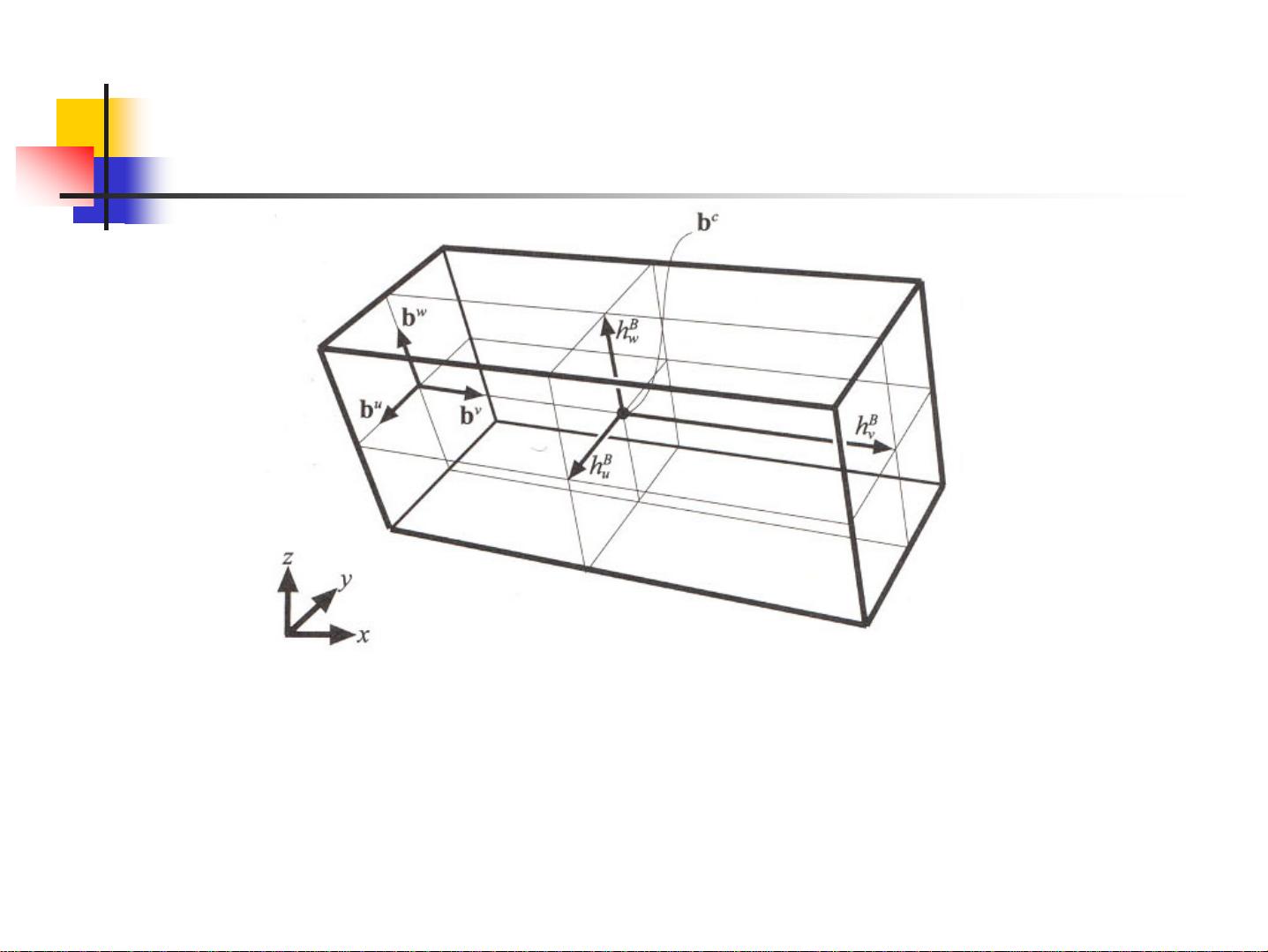
OBB包围盒的定义
有向包围盒(Oriented Bounding Box, OBB)
是一个表面法向两两垂直的长方体。是一个可
以任意旋转的AABB
可以用它的中心点b
c
、三个归一化向量b
u
、b
v
、
b
w
以及半边长h
u
B
、h
v
B
、h
w
B
来描述。
剩余82页未读,继续阅读
192 浏览量
432 浏览量
2022-09-24 上传
181 浏览量
2021-12-08 上传
103 浏览量
点击了解资源详情
192 浏览量

greatxiaoxiao
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
