二自由度机器人位置控制的MATLAB仿真与PD控制研究
版权申诉
46 浏览量
更新于2024-06-23
收藏 1.23MB DOC 举报
随着科技的飞速进步,二自由度机器人在近年来的研究与应用中扮演了重要角色。作为一种具有两个独立活动轴的机械结构,它们能够在有限的空间内实现精确的定位和操作,这在工业自动化、精密制造业、医疗等领域展现出广阔的应用前景。我国在机器人技术的发展上虽有提升,但与发达国家相比仍有一定的差距,因此,针对二自由度机器人进行深入研究并提升其性能,对于缩小这种差距、推动我国机器人产业的发展具有实际价值。
本文主要关注的是二自由度机器人位置控制的设计与仿真。作者采用经典的PD(比例-微分)控制策略,这是一种常用的反馈控制方法,它结合了比例控制的响应速度和微分控制的消除稳态误差的优点。通过MATLAB这一强大的数值计算软件,结合Simulink图形化编程环境和Robot工具箱,设计者能够构建出二自由度机器人的精确几何模型和动力学模型,从而准确模拟其运动特性。
设计过程中,关键步骤包括建立数学模型,设定控制目标,如位姿跟踪或路径规划,然后通过调整控制器参数,如比例系数和积分系数,优化控制系统的性能。控制器参数的精细调整是实现精确控制的关键,它直接影响机器人在空间中的运动精度和稳定性。
在实验阶段,通过实际操作获取二自由度机器人的实时数据,这些数据被导入MATLAB中进行仿真分析。仿真结果不仅验证了理论模型的有效性,还能提供对控制器性能的深入理解,并为进一步优化提供依据。通过这种方式,设计者能够确保机器人在各种工作条件下都能实现高效、稳定的位姿控制。
总结来说,这篇文档详细介绍了如何利用MATLAB工具链进行二自由度机器人位置控制的系统设计,强调了PD控制方法的重要性,并展示了通过仿真优化控制器参数以提高机器人性能的实用过程。这项研究对于提升我国机器人技术水平、推动工业机器人在制造业中的广泛应用具有显著的意义。

第 2 章 机器人运动学及动力学
2.1 运动学概述
机器人手臂运动学研究的是手臂各连杆间的位移关系、速度关系和加速
度关系,本章只讨论位移关系。机器人手臂可以看作为一个开式运动链,它
是由一系列连杆通过转动或移动关节串联而成的。开链的一端固定在基座上,
另一端是自由的,安装着手爪(或称末端执行器),用以操作物体,完成各
种作业。关节由驱动器驱动,关节的相对运动导致连杆的运动,使手爪到达
所需的位姿。在轨迹规划时,人们最感兴趣的是操作臂末端执行器相对于固
定参考系的空间描述。
运动学包括正运动学和逆运动学。正运动学是已知各关节的角度来确定
末端执行器的位置和姿态:而逆运动学是由末端执行器的位置和姿态来反求
达到 此位 姿的 各关 节的角 度。 运动 学求 解主要 有两 种方 法, 第一种是基 于
Denavit和Hartenberg提出一种通用的方法(D—H法),在每个连杆上固接一
个坐标系,两连杆的空间关系,从而推导出“手爪坐标系”相对于“参考系”
的等价齐次变换短阵,建立操作臂的运动方程。第二种是基于旋量理论的指
数积(Product—of—ExponentialmPOE)公式砼1将机器人的运动学方程表示
成运动旋量的指数积形式,从而构造与关节构型无关的运动学正、逆解形式。
而本章将采用D-H法建立机器人的运动学方程。
2.2 机械手
2.2.1 机器手的机构和运动
进行机械手的机构设计和控制时,在正确定义机械手的机构后,需要恰
当地表现机构的运动。
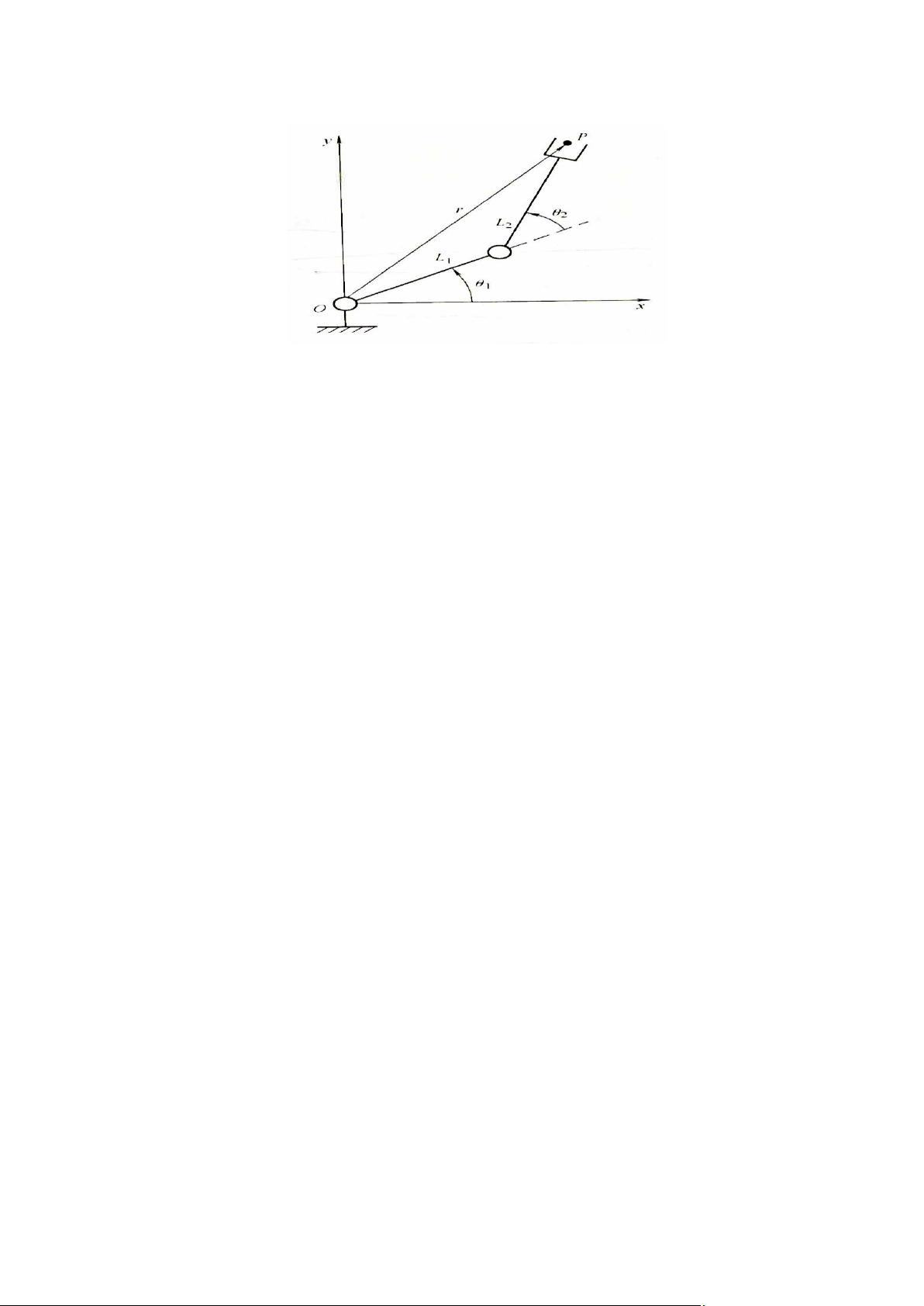
图 2-1 表示的上述二自由度机械手的连杆机构。由于机械手的运动主要
由连杆机构来决定,所以大多数场合是把称为驱动器的执行元件及减速器去
掉后来进行分析。驱动器可以根据需要添加上去。
剩余44页未读,继续阅读
2023-07-11 上传
2023-07-11 上传
2023-07-11 上传
2023-07-11 上传
2023-07-11 上传
2023-07-11 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
