维纳滤波与卡尔曼滤波算法详解
需积分: 14 170 浏览量
更新于2024-08-05
收藏 139KB PDF 举报
"该资源是一份关于维纳滤波与卡尔曼滤波的总结文档,由胡云博撰写。文档详细介绍了这两种滤波算法的基本思想和数学推导过程,主要适用于现代信号处理领域的学习和研究。"
正文:
维纳滤波和卡尔曼滤波是现代信号处理中的关键算法,广泛应用于噪声去除、数据预测和系统状态估计等多个领域。这篇文档首先详细阐述了维纳滤波器的工作原理和推导过程。
维纳滤波器是一种线性滤波器,其设计目标是通过调整滤波器参数,最小化输出与期望信号(参考信号)之间的均方误差。在文档中,作者给出了维纳滤波器的结构图,并解释了滤波器输入、输出以及误差信号的定义。滤波器参数向量h(n)与输入序列x(n)之间的关系被定义为一个有限阶的线性组合。为了找到最优的滤波器参数,文档介绍了使均方误差E[e²(n)]最小化的优化方法,即通过对误差的均方值关于滤波器参数h求导并令其等于零,得出最优滤波器参数h_opt的表达式:h_opt = R_xx⁻¹r_yx,其中R_xx是输入信号的自相关矩阵,r_yx是参考信号与输入信号的协相关矩阵。
文档还提到了正交原理,即最优线性滤波器的误差与输入之间互相关为零,这意味着滤波器能够有效地消除或提取输入信号中的特定成分。这一原理是设计维纳滤波器的重要依据。
接下来,文档很可能会介绍卡尔曼滤波,这是一种在线估计系统状态的递归算法,尤其适用于存在噪声的情况。卡尔曼滤波基于贝叶斯理论,结合先验知识和新测量数据,更新对系统状态的估计。其基本步骤包括预测和更新两个阶段,利用系统的动态模型和观测模型来不断优化状态估计。
卡尔曼滤波器的关键在于卡尔曼增益,它决定了如何权衡预测和观测信息。通过适当计算卡尔曼增益,可以实现对系统状态估计的最小均方误差。在实际应用中,卡尔曼滤波常用于导航、控制工程、图像处理等领域。
总结来说,这篇文档深入探讨了维纳滤波和卡尔曼滤波的基本理论,对于理解这两种滤波算法的原理和应用具有很高的价值。无论是初学者还是经验丰富的工程师,都能从中受益,提升对现代信号处理技术的理解。
维纳滤波与卡尔曼滤波总结
胡云博
摘要
维纳滤波和卡尔曼滤波属于现代信号处理中较为基础且核心的滤波算
法,本文总结了这两种滤波算法的核心思想和较为详细的数学推导过程。
1 维纳滤波器的思想与推导
ADF
( )y n
( )x n
( ) ( ) ( ) ( )
( ) ( ) ( )
T
e n y n h n x n
y n n n
= - *
= - h x
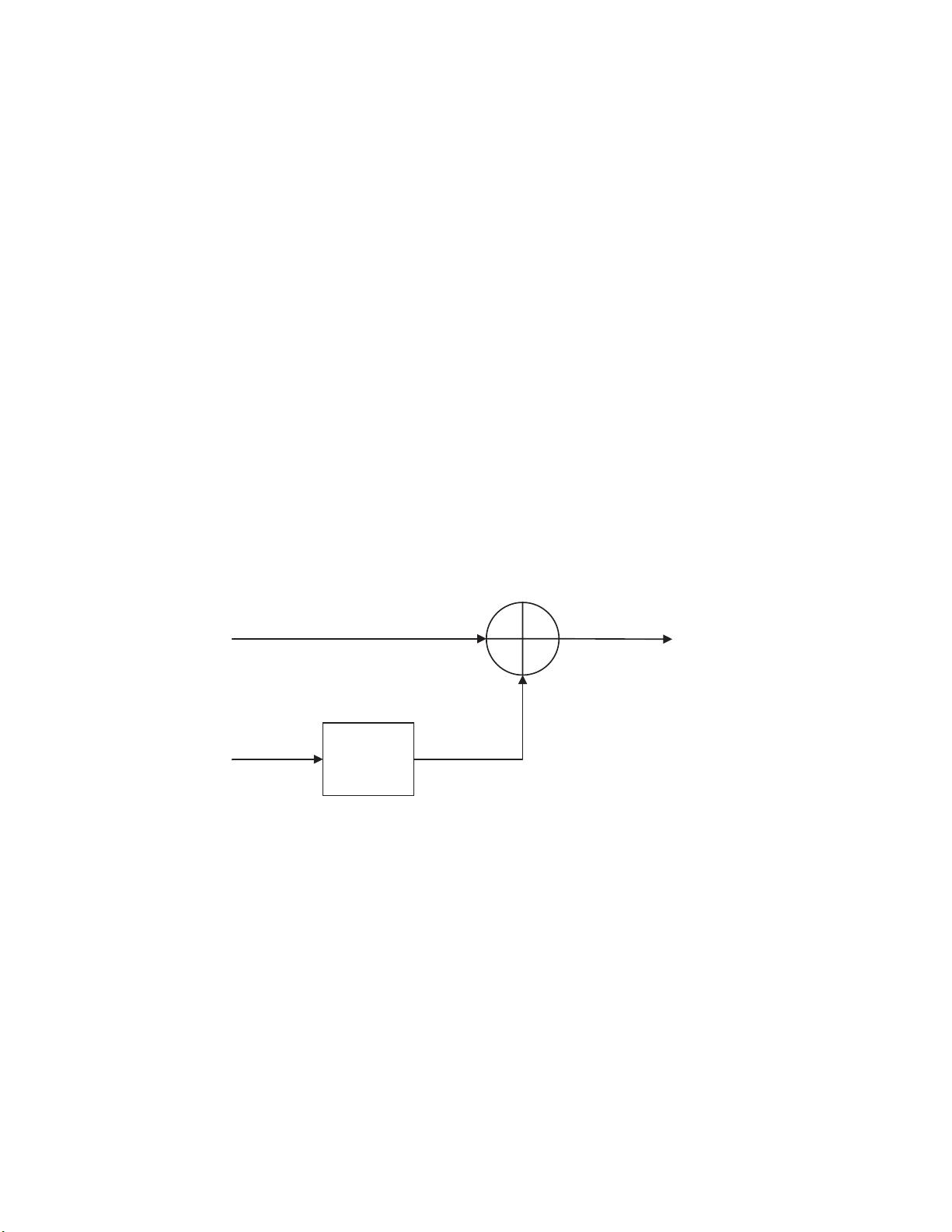
图 1: 维纳滤波器结构
图 1所示的维纳滤波器的工作流程如下,x(n) 为滤波器的输入,y(n) 为
维纳滤波器的参考信号,e(n) = y(n) − h
T
x(n) 为维纳滤波器输出与参考信
号的误差。其中 h(n) 为滤波器的参数向量,x(n) 为 x(n) 的序列:
h(n) =
h(n)
h(n − 1)
· · ·
h(n − N + 1)
, x(n) =
x(n)
x(n − 1)
· · ·
x(n − N + 1)
1
下载后可阅读完整内容,剩余5页未读,立即下载
405 浏览量
228 浏览量
2021-11-29 上传
2021-10-13 上传
2021-09-14 上传
2022-11-12 上传
139 浏览量
2021-09-14 上传

hirohiroro
- 粉丝: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入解析JavaWeb中Servlet、Jsp与JDBC技术
- 粒子滤波在视频目标跟踪中的应用与MATLAB实现
- ISTQB ISEB基础级认证考试BH0-010题库解析
- 深入探讨HTML技术在hundeakademie中的应用
- Delphi实现EXE/DLL文件PE头修改技术
- 光线追踪:探索反射与折射模型的奥秘
- 构建http接口以返回json格式,使用SpringMVC+MyBatis+Oracle
- 文件驱动程序示例:实现缓存区读写操作
- JavaScript顶盒技术开发与应用
- 掌握PLSQL: 从语法到数据库对象的全面解析
- MP4v2在iOS平台上的应用与编译指南
- 探索Chrome与Google Cardboard的WebGL基础VR实验
- Windows平台下的IOMeter性能测试工具使用指南
- 激光切割板材表面质量研究综述
- 西门子200编程电缆PPI驱动程序下载及使用指南
- Pablo的编程笔记与机器学习项目探索
