快速鲁棒单目视觉惯性定位算法
需积分: 9 39 浏览量
更新于2024-07-15
收藏 1.93MB PDF 举报
本文档《Fast and Robust Monocular Visua-Inertial Odometry》主要探讨了在快速移动相机和图像模糊或场景纹理缺失的情况下,单目视觉惯性定位(Visual-Inertial Odometry, VIO)算法面临的挑战。传统的基于点特征的SLAM(Simultaneous Localization and Mapping)方法在这些情况下难以有效地跟踪足够多的有效特征点,导致定位精度下降,鲁棒性减弱,甚至可能导致系统运行不畅。
作者Ning Zhang和Yongjia Zhao来自北京航空航天大学的虚拟现实技术与系统国家重点实验室,他们针对这一问题提出了一个新的单目视觉VIO算法。该算法的关键在于结合了点和线特征的利用,以及惯性测量单元(IMU)数据的融合。通过这种方式,他们构建了一个包含几何信息的环境特征地图,这有助于在视觉信息不足时提供稳定的定位框架。
传统的单目视觉SLAM依赖于图像中的关键点,但在快速运动或低纹理环境中,这些点可能会丢失或者难以识别,导致定位不稳定。而引入线特征,如边缘和轮廓,可以增加算法对场景的适应性,因为线条在视觉上通常比点更稳定,且在一定程度上能够抵抗图像模糊的影响。
同时,IMU数据作为惯性传感器提供的运动信息,对于估计相机姿态和速度非常关键。它能够在视觉信息不足时提供位置和尺度的先验知识,帮助恢复和校准视觉估计。通过将视觉和IMU数据融合,算法可以在实时性、精度和鲁棒性之间找到一个平衡,即使在动态环境下也能保持良好的性能。
这篇论文的主要贡献是提出了一种融合点线特征并充分利用IMU数据的单目视觉惯性SLAM算法,旨在提高在复杂环境中的定位能力,尤其是在视觉质量不佳时。这对于无人机导航、机器人视觉导航以及其他依赖视觉和惯性数据的应用具有重要的实际意义。通过优化算法设计和处理技术,该工作有望改善现有VIO系统的性能瓶颈,推动SLAM技术的发展。
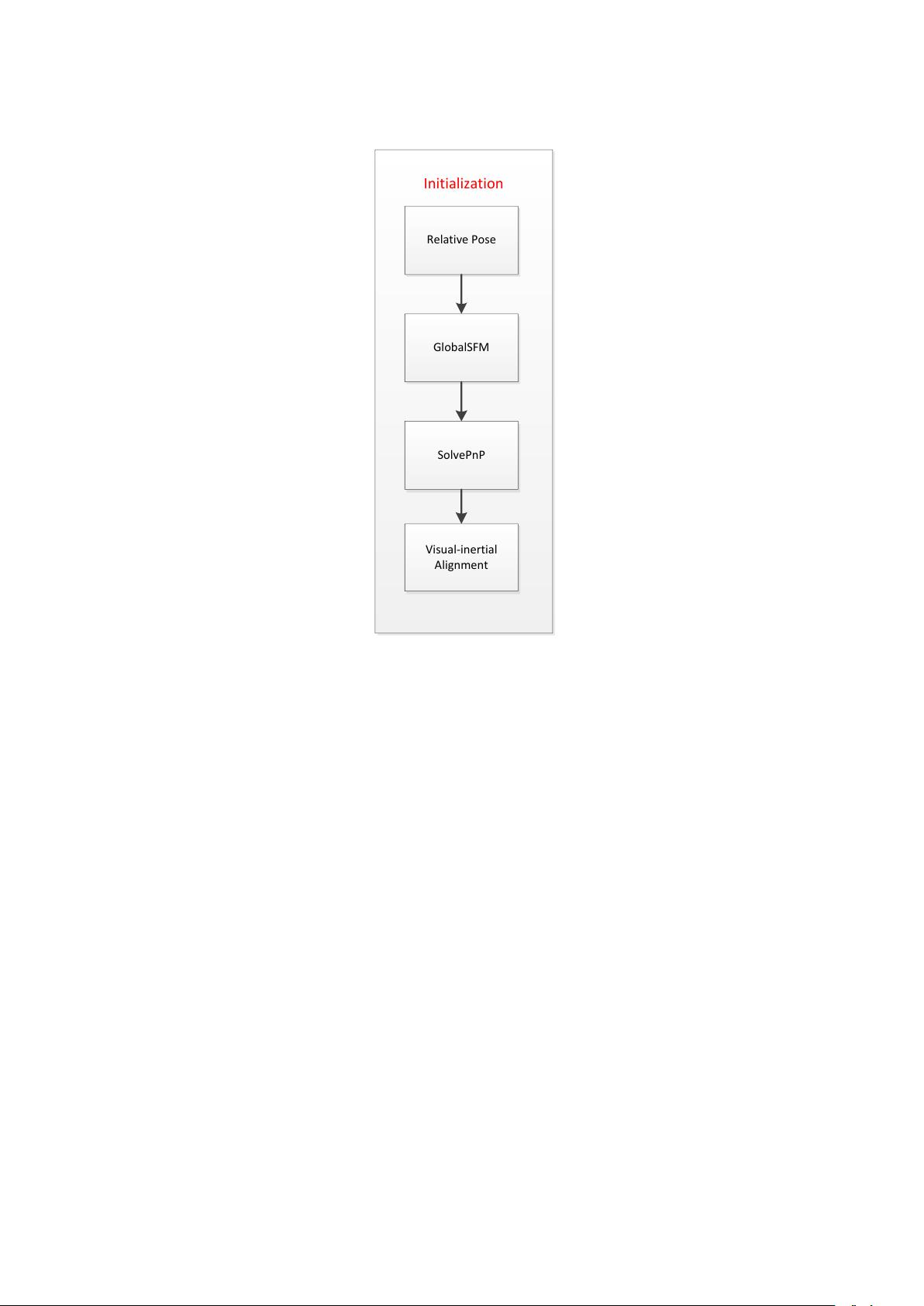
Sensors 2019, 19, 4545 5 of 21
Relative Pose
GlobalSFM
SolvePnP
Visual-inertial
Alignment
Initialization
Figure 2. Initialization flow chart.
At this point, the pose information of all keyframes and the 3D information of the points and line
segments can be obtained. Since the external parameters
q
b
c
, p
b
c
between the camera and the IMU
are known, all variables can be transformed into the IMU coordinate system to represent:
q
w
b
k
= q
w
c
k
⊗
q
b
c
−1
sp
w
b
k
= sp
w
c
k
− R
w
b
k
p
b
c
, (1)
where
s
is an unknown scale factor. According to the method in [
38
], the vision-only pose estimation
result and the IMU measurement pre-integration are visual-inertial aligned, and the absolute scale,
the gravity acceleration, the speed information of the camera state, and the zero offsets of the IMU can
be estimated.
Since the IMU pose estimation data is of absolute scale, the camera pose estimation is not drifting.
After the two are aligned, the absolute scale of the camera pose can be well estimated. At this point,
the initialization process is complete.
2.3. IMU Measurement Pre-Integration
The IMU consists of a three-axis accelerometer and a three-axis gyroscope that measure angular
velocity and acceleration relative to the inertial coordinate system. Since the measurement frequency of
the IMU is much faster than that of the vision camera, as shown in Figure 3, it is desirable to incorporate
constraints from inertial measurements into the motion estimation, which requires integrating the
measurements of the numerous IMU data of two adjacent visual keyframes into one constraint.
The manifold-based pre-integration theory adopted in this paper was proposed by Forster et al.
剩余20页未读,继续阅读
2022-07-14 上传
2017-11-06 上传
2019-10-22 上传
2022-07-13 上传
2022-09-21 上传
2022-07-15 上传
2022-07-15 上传
2022-07-15 上传
2024-07-12 上传

白菜888
- 粉丝: 7
- 资源: 74
 我的内容管理
展开
我的内容管理
展开







最新资源
- mushokunosora.github.io
- JAVA JSP 实现 信息办公 XML考试系统
- graph-utils-开源
- p4-kangaroos
- billboard-top-100:Node.js API,可从Billboard的图表中检索顶级歌曲,专辑和歌手
- Greedy-Hunter-Game
- 易语言-EDB数据库分页操作
- 基于ASP.NET开发的网上车辆档案管理系统(源代码+论文+毕业设计).rar
- flight-recovery-model:航班恢复模型
- StudiHub-Web:StudyHub网站,大学教育专业项目
- react-remote-redux:远程Redux的简单React绑定
- excursion:Codecademy项目
- tagnity - easy social e-commerce-crx插件
- aluraquiz:Projeto criado durante一个Reactv2
- sports:运动会管理系统
- flatdoc-template:使用 Flatdoc 和 Mermaid 使用多个 Markdown 文件生成文档的模板
