"工业机器人搬运系统设计与应用研究"
版权申诉
131 浏览量
更新于2024-02-25
收藏 892KB DOCX 举报
在当今大规模制造业中,工业机器人作为自动化生产线上的重要成员,逐渐受到企业的青睐并被广泛应用。工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平。本课题主要对搬运机器人的总体结构展开讨论,通过详细了解搬运机器人的应用现状并提出了具体的设计要求。随后,根据搬运机器人各部分的设计原则,进行了系统总体方案设计,包括机器人的手部、腕部、臂部、腰部在内的机械结构设计。此搬运机器人的驱动源来自液压系统、电机,执行元件包括柱塞式液压缸、摆动液压缸、伸缩式液压缸等。通过液压缸的运动来实现搬运机器人的各关节运动,进而实现搬运机器人的实际作业。在本搬运机器人的设计中,液压系统和机械结构设计起着至关重要的作用,对搬运机器人的操作起着决定性的影响。
目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作。搬运机器人作为其中的重要一员,其设计和使用将直接影响生产线的效率和成本。因此,本文主要对搬运机器人的设计和应用进行了深入研究,旨在为企业提高生产效率和保障产品质量提供技术支持。
搬运机器人的设计要求包括结构轻巧、稳定性好、动作精准、操作简便、安全可靠等方面。在总体方案设计中,不仅要考虑机器人的外形设计,还需要充分考虑其内部各部件的布局和连接方式,以及对液压系统和电机的选择和配置。而在机械结构的设计中,需要充分考虑各个部件之间的协调性和配合性,以确保机器人在搬运过程中能够稳定、高效地完成任务。
液压系统作为机器人的驱动源,对于搬运机器人的设计起着至关重要的作用。合理选择液压缸的类型和参数,保证液压系统的稳定性和工作效率,是设计过程中必须要考虑的问题。而在机械结构设计中,需要综合考虑各个部件的制造工艺、材料选用、连接方式等因素,以确保机器人在长时间的使用过程中能够保持良好的运行状态。
总的来说,本文针对搬运机器人的设计和应用进行了深入研究和分析,通过对液压系统和机械结构设计的探讨,为搬运机器人的制造和使用提供了重要的技术支持和指导。搬运机器人的设计和应用不仅对企业的生产效率和产品质量有着直接的影响,同时也是工业自动化水平的重要体现和推动者。希望本文的研究成果能够对搬运机器人的发展和应用起到积极的推动作用,为工业自动化的进步做出自己的贡献。

2.2 自由度和坐标系的选择
机器人的运动自由度是指各运动部件在三维空间相当于固定坐标系所具有的独
立运动数,对于一个构件来说,它有几个运动坐标就称其有几个自由度。各运动部件
自由度的总和为机器人的自由度数。机器人的手部要像人手一样完成各种动作是比较
困难的,因为人的手指、掌、腕、臂由19个关节组成,共有27个自由度。而生产实践
中不需要机器人的手有这么多的自由度一般为3-6个(不包括手部)。本次设计的搬运
机器人为5自由度即:手爪张合;腕部回转;臂部伸缩;臂部回转;臂部升降。
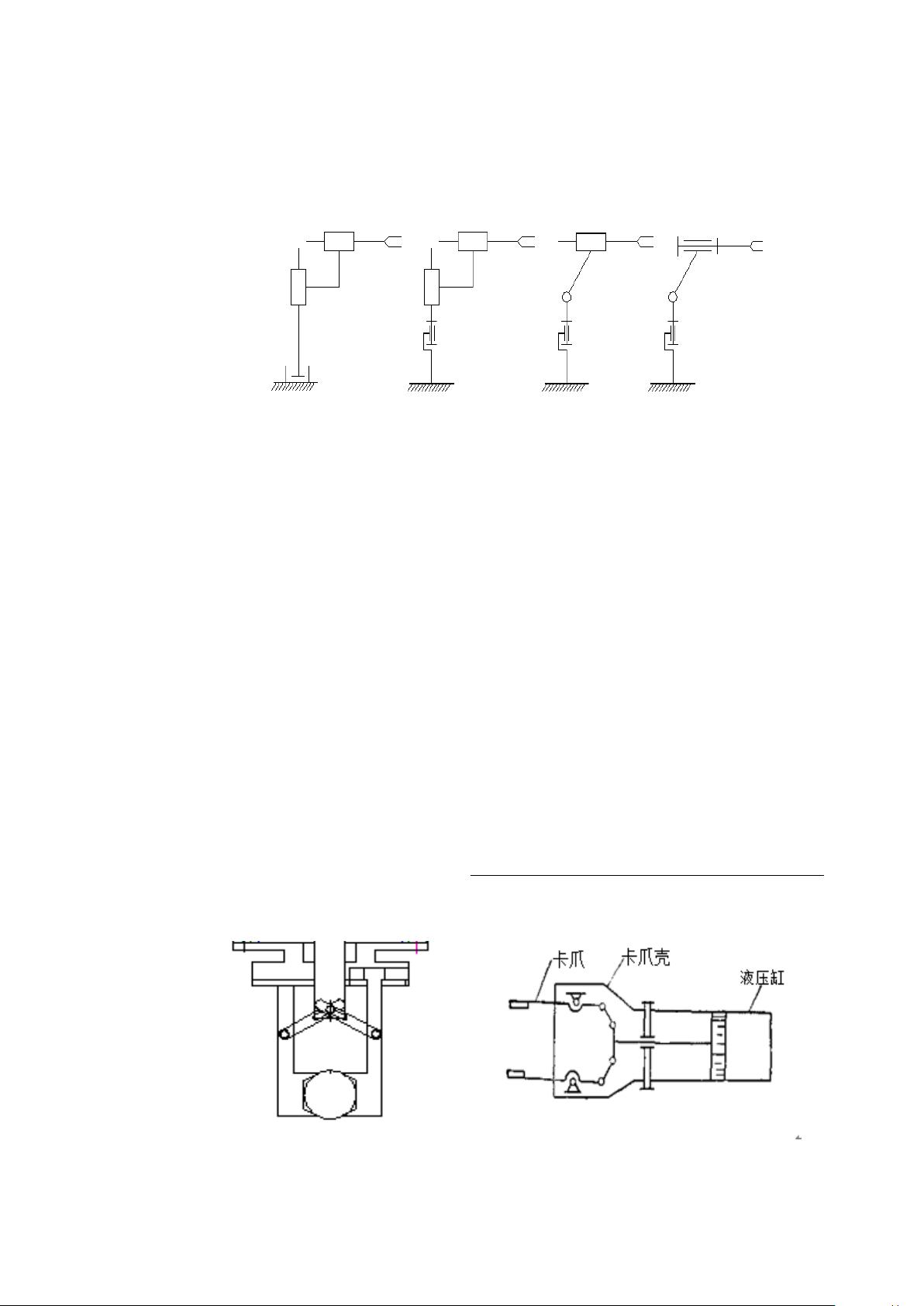
工业机器人的结构形式主要有直角坐标结构、圆柱坐标结构、球坐标结构、关节
型结构四种。各结构形式及其相应的特点,分别介绍如下:
1.直角坐标机器人结构
直角坐标机器人的空间运动是用三个相互垂直的直线运动来实现的,如图 2-2(a)
所示。由于直线运动易于实现全闭环的位置控制,所以,直角坐标机器人有可能达到
很高的位置精度(μm 级)。但是,这种直角坐标机器人的运动空间相对机器人的结构
尺寸来讲,是比较小的。因此,为了实现一定的运动空间,直角坐标机器人的结构尺
寸要比其他类型的机器人的结构尺寸大得多。
直角坐标机器人的工作空间为一空间长方体。直角坐标机器人主要用于装配作业
及搬运作业,直角坐标机器人有悬臂式,龙门式,天车式三种结构
[3]
。
2.圆柱坐标机器人结构
圆柱坐标机器人的空间运动是用一个回转运动及两个直线运动来实现的,如图
2-2(b)。这种机器人构造比较简单,精度还可以,常用于搬运作业。其工作空间是
一个圆柱状的空间。
3.球坐标机器人结构
球坐标机器人的空间运动是由两个回转运动和一个直线运动来实现的,如图 2-2
(c)。这种机器人结构简单、成本较低,但精度不很高。主要应用于搬运作业。其工
作空间是一个类球形的空间
[3]
。
4.关节型机器人结构
关节型机器人的空间运动是由三个回转运动实现的,如图 2-2(d)。关节型机器
人动作灵活,结构紧凑,占地面积小。相对机器人本体尺寸,其工作空间比较大。此
种机器人在工业中应用十分广泛,如焊接、喷漆、搬运、装配等作业,都广泛采用这
种类型的机器人。

剩余68页未读,继续阅读
2023-07-11 上传
2023-07-11 上传
2021-09-25 上传
2023-07-15 上传
2022-06-11 上传
2022-07-03 上传

老帽爬新坡
- 粉丝: 91
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握数学建模:层次分析法详细案例解析
- JSP项目实战:广告分类系统v2.0完整教程
- 如何在没有蓝牙的PC上启用并使用手机蓝牙
- SpringBoot与微信小程序打造游戏助手完整教程
- 高效管理短期借款的Excel明细表模板
- 兄弟1608/1618/1619系列复印机维修手册
- 深度学习模型Sora开源,革新随机噪声处理
- 控制率算法实现案例集:LQR、H无穷与神经网络.zip
- Java开发的HTML浏览器源码发布
- Android闹钟程序源码分析与实践指南
- H3C S12500R升级指南:兼容性、空间及版本过渡注意事项
- Android仿微信导航页开门效果实现教程
- 深度研究文本相似度:BERT、SentenceBERT、SimCSE模型分析
- Java开发的zip压缩包查看程序源码解析
- H3C S12500S系列升级指南及注意事项
- 全球海陆掩膜数据解析与应用
