Pixhawk2 FMUv3电路原理详解
"Pixhawk2飞控板,也称为PX4FMUv3,是一款用于无人机控制的核心硬件,其原理图展示了电路设计的详细信息。该飞控板的设计旨在实现精确的飞行控制和数据处理,整合了传感器、定时器和中断功能。"
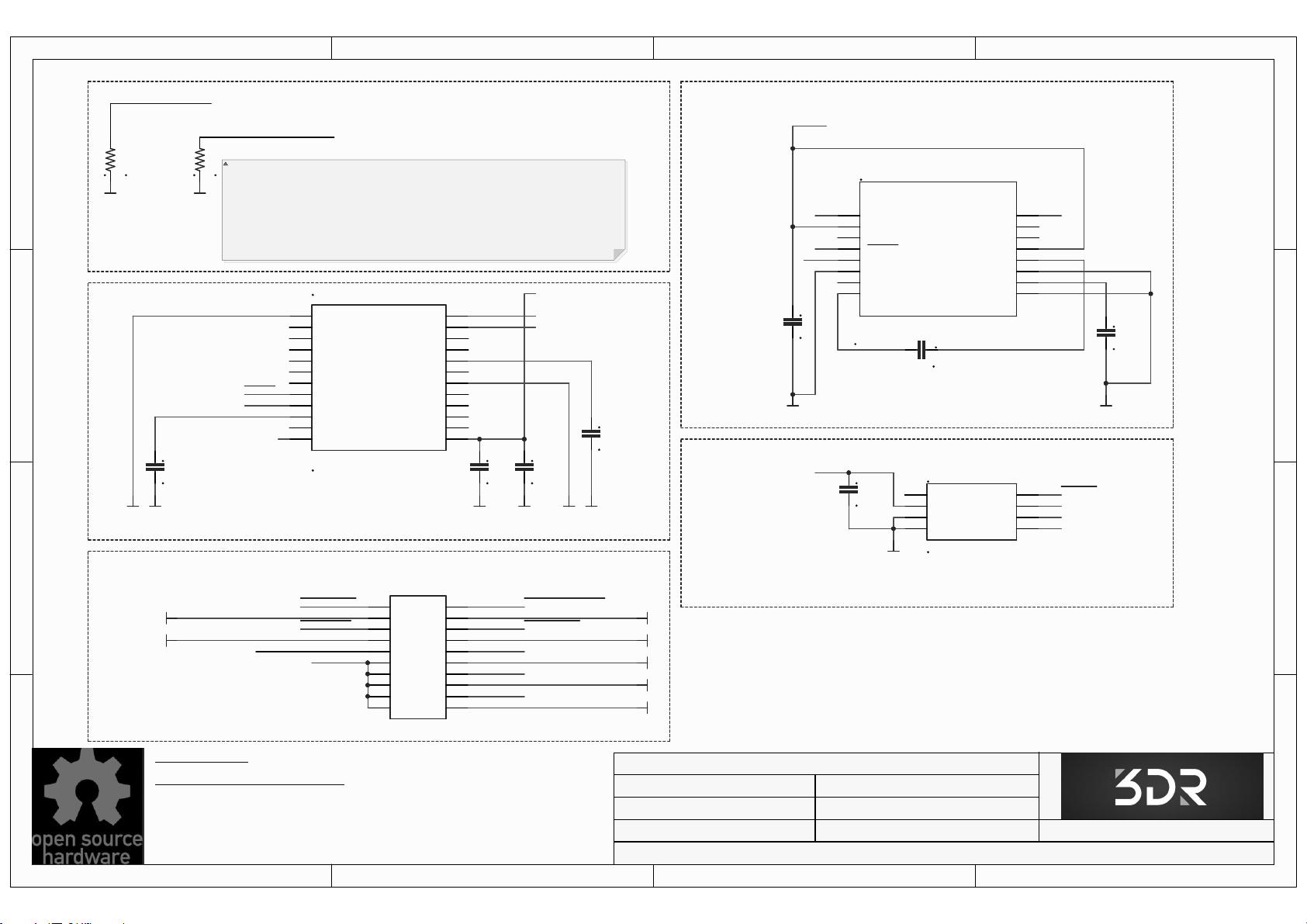
Pixhawk2原理图,或称PX4FMUv3,是无人机技术中的关键组件,主要用于实时处理飞行控制指令和传感器数据。这份原理图揭示了其内部电路的布局和组件配置,以便于开发者和工程师理解其工作原理和进行定制化开发。
在硬件层面,FMU3_D1部分可能是连接到微控制器(Microcontroller Unit, MCU)的数据接口,它通过数字输入/输出(DIO)引脚与其他设备通信。这些引脚的分配表明了对不同功能的优化,例如中断(EXTI)操作和定时器(TIM)分配。例如,EXTI0被分配给TIM3_CH3,与GYRO1的DRDY(Data Ready)信号关联,这意味着当陀螺仪准备好新数据时,可以通过TIM3_CH3捕获这一事件。
定时器分配在MCU的多个端口上,如PE9至PE14分配给TIM1的不同通道,用于不同的FMU通道;而PA15被分配给TIM2_CH1,用于ALARM功能。此外,PB0到PB5以及PD13至PD15被分配给TIM3和TIM4的不同通道,分别用于GYRO、ACCEL、MAG的数据准备信号和其他功能。
晶体振荡器(Crystal Oscillator)X1001确保了系统的精确时钟源,这对于实时控制至关重要。电容C1001、C1002、C1003和电阻R1001、R1002等被动元件用于稳定电源和滤波,保证系统的稳定运行。U1002是一个闪存芯片(FM25V01),用于存储固件和设置。GPIO(General Purpose Input/Output)引脚如PA0到PA3则可用于各种外部设备的连接和控制。
此外,该原理图还标注了一些特殊功能,如IOdebugconsole,这通常用于调试目的,提供对系统内部状态的访问。428-3211-ND标识的HOLD引脚可能用于暂停或恢复微控制器的操作,以进行安全的更新或故障排查。
Pixhawk2的原理图详细地展示了其硬件架构,包括微控制器、传感器接口、定时器分配和电源管理,这些都是实现高精度飞行控制和自主导航的关键要素。理解和分析这份原理图对于开发、优化和修复可能出现的问题具有极大的价值。
1
1
2
2
3
3
4
4
D D
C C
B B
A A
Title: SENSORS_FMU3_REV_C.SchDoc
Date: 2017/4/7 Time: 17:35:27
Sheet:4 of: 10 Drawn By:
3DRobotics
Philip Rowse
Approved: * Checked By: *
http://www.oshwa.org/
http://creativecommons.org/licenses/by-sa/3.0/
CSB1
4
VDD
1
PS
2
GND
3
SCLK
8
SDO
6
SDI/SDA
7
CSB2
5
824-MS561101BA03-50
U4003
MS5611-01BA
311-1047-1-ND
C4006
0u1
CLKIN
1
NC1
2
NC2
3
NC3
4
NC4
5
AUX_DA
6
AUX_CL
7
/CS
8
AD0/SDO
9
REGOUT
10
FSYNC
11
INT
12
VDD
13
NC5
14
NC6
15
NC7
16
NC8
17
GND
18
RESV1
19
CPOUT
20
RESV2
21
CLKOUT
22
SCL/SCLK
23
SDA/SDI
24
1428-1005-1-ND
U4001
MPU-6000
445-7438-1-ND
C4001
2u2
445-7438-1-ND
C4002
2u2
478-7901-2-ND
C4004
0u01
311-1047-1-ND
C4003
0u1
VDD
2
DRDY
15
SDA/SPI_SDI
16
GND1
11
SCL/SPI_SCK
1
C1
10
SETC
12
VDDIO
13
SPI_SDO
5
SETP
8
NC1
7
NC
3
SPI_CS
4
I2C_!SPI
6
NC2
14
SOC
9
342-1092-1-ND
U4002
HMC5983
445-7362-1-ND
C4007
0u22
311-1047-1-ND
C4005
0u1
1276-2873-1-ND
C4008
4u7
H11905CT-ND
1
1
2
2
3
3
4
4
5
5
6
6
7
7
8
8
9
9
10
10
11
11
12
12
13
13
14
14
15
15
16
16
17
17
18
18
19
19
20
20
GND
GND GNDGNDGNDGND GND
GNDGND
GND
GND
GND
GND
GND
GND
GND
SPI_INT_MISO
SPI_INT_MISO
SPI_INT_MISO
SPI_INT_MOSI
SPI_INT_MOSI
SPI_INT_MOSI
SPI_INT_SCK
SPI_INT_SCK
SPI_INT_SCK
VDD_3V3_SENSORS
VDD_3V3_SENSORS
VDD_3V3_SENSORS
VDD_3V3_SENSORS
ACCEL_MAG_EXT_CS
GYRO_EXT_CS
BARO_CS
MPU_CS
MPU_DRDY
SPI_EXT_MISO
SPI_EXT_MOSI
SPI_EXT_SCK
MPU_EXT_CS
BARO_EXT_CS
SPI_INT_MAG_!CS
311-220LRCT-ND
R4001
220R
GND
VDD_3V3_SENSORS
311-220LRCT-ND
R4002
220R
GND
FMU-VDD_3V3
IMU_TEMPERATURE_CONTROL
due to the serial lines being able to back power the cpu, The SD card can end up in a state where
it's CPU does not shut down correctly, and it goes into a brownout state.
This can cause the SD card to fail on startup. This is charecterised by an SOS tone from the
buzzer, every second startup.
This resistor causes the voltage to hold below the start threshold of the SD card, and therfore
stops the card entering the brownout state.
剩余21页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2017-03-05 上传
133 浏览量
178 浏览量
167 浏览量
2018-02-01 上传

FantasyJXF
- 粉丝: 727
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易语言XML摩托车库存管理源码-易语言
- 基于品Python技术的儿童节庆祝代码+编程知识+技术开发
- 实验6源码.rar
- Gamedevelopmentdecryption.rar_游戏_Visual_C++_
- 仿真+AT89S51单片机 004、广告灯的左移右移 (C语言对照带电路图及说明).rar
- pb9_pb_
- thymioHTTP:Thymio Studio 2.x的HTTP服务器
- voicetour:布兰代斯(Brandeis)2015年夏季JBS语音之旅
- 易语言随机取大小写字母源码-易语言
- mup_ie_classic_asp:使用我公司项目的kindeditor-4.1.10 mod版本上传多个文件
- 基于Gabor滤波的指纹图像增强算法matlab仿真.rar
- C语言初学者学习复习资源
- 毕业论文-源代码- Delphi电脑培训MIS(Access数据库、开题报告、摘要)论文字数:18180字.zip
- 钉钉评价_钉钉出_钉钉、爬虫_
- SlideProjector:滑动幻灯片
- 浪花透明窗口-易语言
