FANUC机器人视觉iRVision应用详解
版权申诉
100 浏览量
更新于2024-06-23
收藏 1.29MB DOCX 举报
"FANUC机器人视觉 iRVision 小结"
FANUC的iRVision是一种先进的机器人视觉系统,它使工业机器人能够通过视觉引导进行精确的定位和操作。iRVision提供了多种功能和补偿方式,以适应各种复杂的工业应用场景。
1.1 Offset补偿和检测方式
iRVision的Offset补偿分为用户坐标系补偿(UserFrameOffset)和工具坐标系补偿(ToolFrameOffset)。前者允许机器人在用户定义的坐标系下,通过视觉系统自动调整抓取位置,以补偿目标物相对于初始位置的偏移。后者则是在工具坐标系下,用于调整放置位置,考虑了目标物在机器人手爪上的相对变化。
检测方式则包括2D单视野检测、2D多视野检测、2.5D单视野检测以及3D单视野和多视野检测。2D检测主要处理平面内的XY轴位移和Z轴旋转,2.5D增加了对Z轴高度变化的检测,而3D检测则能捕捉目标的全方位三维变化。
1.2 照相机固定方式
iRVision支持两种相机安装方式:固定相机和机器人搭载相机。固定相机安装简单,可在机器人运动时拍照,但检测区域固定,若相机与机器人相对位置改变需重新校准。机器人搭载相机则能随着机器人的移动改变检测范围,提高检测精度,但需要注意光源干扰、电缆磨损等问题。
2.1 iRVision启动设置
在设置iRVision时,首先要连接相机,如配置SONY XC系列的相机,并确保其背面的开关正确设置。此外,还需进行相机校准,确保图像质量和定位精度。
iRVision的这些功能和设置使得它在自动化生产线上的应用广泛,例如装配、拣选、包装等任务,能显著提高生产效率和精度。了解并合理选择这些特性对于优化机器人系统的性能至关重要。同时,为了确保系统的稳定运行,用户还需要定期维护和检查相机及连接电缆,避免因硬件问题导致的视觉系统失效。
2) 应用用户坐标系标定 (Application User Frame)
使用作好的工具坐标系标定一个用户坐标系,我们称此用户坐标
系为 Application User Frame。
- 一般此用户坐标系设置在目标定位的平面上任意水平位置。
- 照相机标定对应照相机在此用户坐标系内的相对位置。
- 确认 XY 平面平行与目标位移的平面,Z 轴正方向指向照相机。
- Vision 检测出目标在用户坐标系内位置并补偿给机器人。
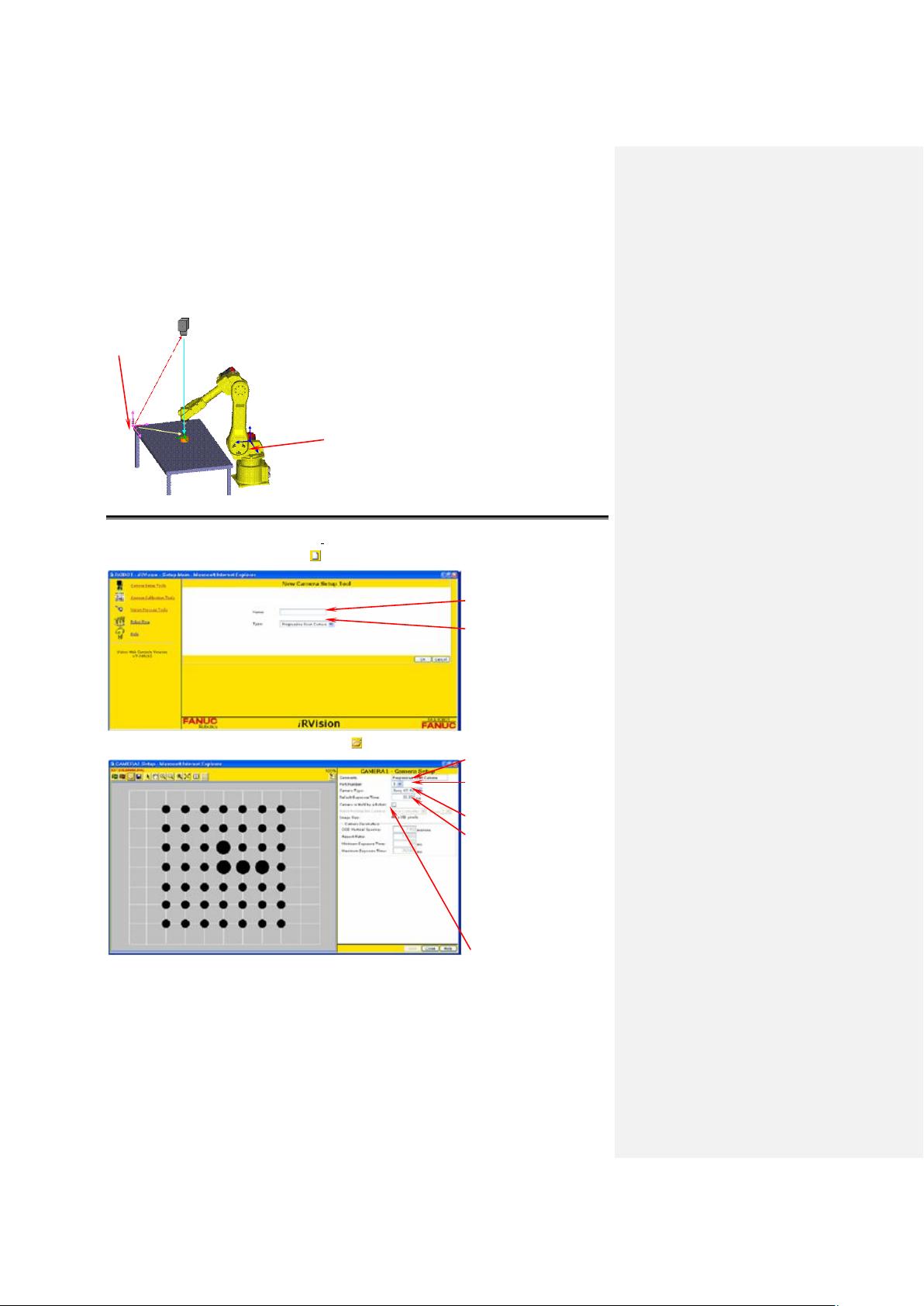
3.3 设置照相机 (Camera Setup)
1) 打开机器人主页,选择 [Vision Setup] 进入 Vision 设置界面。
2) 选择 [Camera Setup Tools],点击 ,新建一个照相机。
Name:
照相机名
Type:
照相机形式
请选择
Progressive Scan Camera
3) 点击 [OK] 确认,双击建立的照相机或点击 选择,进入照相机设置界面,完成如下设置。
Comment:注释
Port Number:接口号
请选择照相机对应连接接口
Camera Type:照相机型号
SONY XC-56
Default Exposure Time:
默认曝光时间
曝光时间↑,视野明暗度↑
曝光时间↓,视野明暗度↓
请调整合适值
Robot Mounted Camera :
照相机是否固定在机器人上
Robot Holding the Camera :
当照相机固定在机器人上时
设置固定相机的机器人
Camera parameters:相机参数
4) 完成所有设置后,点击 [SAVE] 存盘。
在照相机标定时,照相机
相对用户坐标系的位置和
方向将被计算所得。
Application
User Frame
World Frame
照相机确定目标,并计算
在用户坐标系内的偏移。
机器人基于在用户坐标系
内的偏移进行运动。

剩余42页未读,继续阅读
2022-07-14 上传
130 浏览量
2023-02-27 上传
2022-07-01 上传
411 浏览量
779 浏览量
196 浏览量

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- CUDA9.0+cudnn7安装大礼包.zip
- 拖动滑块进行验证
- Docker零基础学习全套教程(含项目实战和源码)
- tarea-express-v1
- 网钛淘拍系统官方网下载v1.51
- 着作权法案例判决评析——计算机程序之保护
- uorhousepositions:简单的Powershell脚本可下载UOR房屋位置并创建地图文件
- multisetdiff:与 setdiff 类似,但 A 的任何重复元素在 B 中每次出现时仅被删除一次-matlab开发
- 愤怒的小鸟-阶段4:愤怒的小鸟-阶段4
- devopsproject1
- gcc内网离线安装包,CentOS7亲测可用
- ion-tools:工具和实用程序,使ION网络工作和使用ION DID变得轻松自如
- 工程建设项目管理体制
- RecommenderOnTf2:基于TensorFlow 2.3实现的推荐系统神经网络,主要关注模型构建,基本不包含数据预处理阶段
- LFO - Maker:用于构建不同 LFO 类型的系统-matlab开发
- diabetic-retinopathy:基于人眼图像的糖尿病性视网膜病变分类系统
