AUTOSAR 4.2.2 CAN Driver规格更新与新增功能
需积分: 16 175 浏览量
更新于2024-07-16
1
收藏 2.14MB PDF 举报
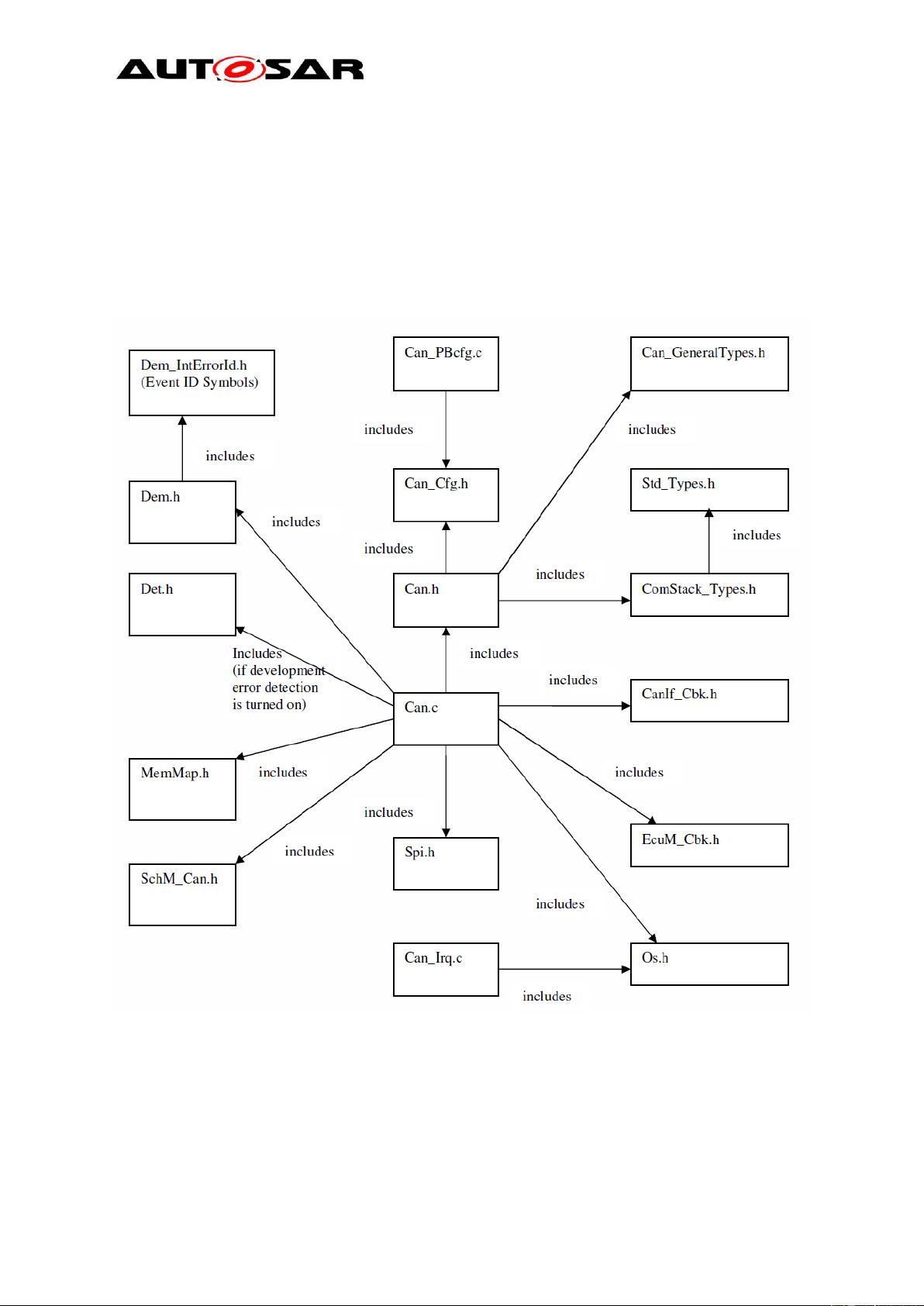
AUTOSAR SWS CANDriver是AUTOSAR(Automotive Open System Architecture)规范中的一个重要组成部分,专注于Controller Area Network (CAN)驱动器功能。该文档是AUTOSAR Release 4.2.2版本,主要关注CAN硬件对象计数参数、错误分类、唤醒通知控制、默认错误追踪器的名称更改以及多个功能的改进和小bug修复。
在4.2.2版本中,有显著的变化包括:
1. CanHwObjectCount参数的多态性从之前的某个值改为1,这可能意味着对硬件资源的管理和配置有所调整。
2. 错误分类的更新,这可能涉及到错误处理算法的优化或新的错误分类标准的引入,以提高系统的稳定性和可靠性。
3. 允许用户更精细地控制唤醒通知的启用和禁用,这涉及到实时性能管理和低功耗策略。
4. "Development Error Tracer"更名为"Default Error Tracer",可能是为了提供一个默认的错误跟踪机制,便于开发者快速定位问题。
5. 提供了完整的CAN Functional Driver支持,包括触发传输功能,表明驱动的全面性和功能增强。
在4.1.3版本中,着重于新需求的添加和现有需求的修改:
- 新增了SWS_CAN_00497, SWS_CAN_00498, SWS_CAN_00499, 和 SWS_CAN_00496等需求,这些可能是对性能、安全或特定功能的要求。
- 对ECUC_Can_00445, SWS_CAN_00487, SWS_CAN_00469, SWS_CAN_00475, 和 SWS_CAN_00479等需求进行了修订,表明对既有功能的改进或合规性调整。
- 删除了SWS_CAN_00476和SWS_Can_00414的需求,可能是因为这些需求不再适用或者已被合并到其他部分。
4.1.2版本中,删除了ScheduledFunctions章节中关于定时功能的API表格行,这可能是为了简化接口设计或提高代码的易用性。同时,对某些范围进行了修改,可能涉及接口参数的调整或限制。
总体来说,这个文档详细描述了AUTOSAR SWS CANDriver在不同版本中的变化,着重于增强CAN驱动的功能性、灵活性和兼容性,以便于适应汽车电子系统中不断增长的复杂性和要求。对于开发人员来说,理解这些更改对软件设计、实现和测试至关重要。

Specification of CAN Driver
AUTOSAR Release 4.2.2
16 of 106 Document ID 011: AUTOSAR_SWS_CANDriver
- AUTOSAR confidential -
4 Constraints and assumptions
4.1 Limitations
A CAN controller always corresponds to one physical channel. It is allowed to
connect physical channels on bus side. Regardless the CanIf module will treat the
concerned CAN controllers separately.
A few CAN hardware units support the possibility to combine several CAN controllers
by using the CAN RAM, to extend the number of message objects for one CAN
controller. These combined CAN controller are handled as one controller by the Can
module.
The Can module does not support CAN remote frames.
[SWS_Can_00237] ⌈ The Can module shall not transmit messages triggered by
remote transmission requests.⌋ (SRS_Can_01147)
[SWS_Can_00236] ⌈ The Can module shall initialize the CAN HW to ignore any
remote transmission requests.⌋ (SRS_Can_01147)
4.2 Applicability to car domains
The Can module can be used for any application, where the CAN protocol is used.


剩余105页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-02 上传
2021-08-31 上传
2021-08-31 上传
2021-10-02 上传
2021-10-02 上传
2022-08-01 上传

zwmyxfbenet
- 粉丝: 4
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Resolver COM object-开源
- QIM_DCT.zip_图形图像处理_matlab_
- fastchess:通过单矩阵乘法预测最佳国际象棋棋步,准确率达到27.5%
- EnergyEfficientMedianFilterOnFPGA-Group:基于VHDL消除图像中的噪点
- django-keepcool:Django 项目的通用单元测试生成器
- CATIA V5R21钣金设计经典实例视频教程下载实例17 电源外壳组件.zip
- 基于STM32+OpenMV设计的识别灯自动停车的智能小车 .zip(毕设/课设/竞赛/实训/项目开发)
- ludumdare32:[合并到tobypinder] Apt - Advanced Persistent Threat
- PHP实例开发源码—新版php米酷在线视频影视系统源码 V7.0.3 完整版(带解析接口).zip
- cha-bu.rar_Windows编程_Visual_Basic_
- mongoose-history-log:将事件集合添加到架构
- mz-assistant:经理专区助理
- CATIA V5产品设计经典实例视频教程下载实例19 咖啡壶.zip
- NissanDefinitions:A2L支持的Nissan 350z和Infiniti G35 ROM。 不支持任何其他车辆
- VUE的股票配资系统点策略.zip
- pso_故障诊断_机械故障_支持向量机_PSO_
