永磁同步电机FOC控制详解及Simulink建模
需积分: 5 113 浏览量
更新于2024-06-19
收藏 3.17MB PDF 举报
"永磁同步电机FOC控制技术的详细解析"
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种广泛应用的电动机类型,因其高效、高功率密度和良好的动态性能而受到青睐。在FOC(Field Oriented Control,也称为向量控制)策略下,PMSM的控制性能可以进一步提升。
1.1 永磁同步电机数学模型及常用公式
永磁同步电机的数学模型是理解和设计FOC的基础。在不同的坐标系下,电机的方程有所不同:
- ABC三相静止坐标系:这是电机最基础的表示方式,直接对应于电机的三相绕组。
- αβ静止坐标系:通过克拉克变换(Clark Transformation)将三相电流转换为两相直轴(d)和交轴(q)电流,简化了控制系统的设计。
- DQ旋转坐标系:通过帕克变换(Park Transformation)将αβ坐标系下的电流转换到与磁场旋转方向一致的坐标系,便于实现磁场定向。
1.2 永磁同步电机参数测量及对控制的影响
- 极对数:决定了电机的同步速度,影响电机的运行特性。
- 定子电阻:影响电机的动态响应和效率。
- DQ轴电感:不均匀的电感可能导致转矩波动和效率下降,需要准确测量以优化控制算法。
- 转矩常数和反电动势系数:与电机的转矩输出和电压响应有关,是设计控制策略的关键参数。
- 转动惯量:影响电机的加速和减速性能,对快速响应应用尤其重要。
2. FOC原理
- FOC概述:其核心思想是将交流电机视为直流电机来控制,通过坐标变换实现磁场定向,从而独立控制电机的转矩和磁链。
- 坐标变换:包括Clark变换和Park变换,使得电机的磁场和转矩控制更为精确。
- PI控制器及参数设计:用于调节d轴和q轴电流,实现磁链和转矩的独立控制。
- Park逆变换和Clarke逆变换:将控制信号转换回原坐标系,以便在实际电机中实施。
- SVPWM(Space Vector Pulse Width Modulation)调制:优化电压矢量分配,提高电机效率和降低谐波。
- 谐波注入SVPWM:通过引入特定的谐波成分,可以改善电机性能,如减少转矩纹波。
FOC技术的实施通常结合Simulink进行建模和仿真,以验证控制算法的有效性。通过代码生成工具,可以直接将模型转化为嵌入式系统的代码,在开发板上进行硬件演示验证。
相关链接提供了博客和视频教程,可以帮助初学者逐步理解并实现永磁同步电机的FOC控制。开发板资源则为实际操作提供了硬件支持。对于希望深入理解和实践FOC控制技术的人来说,这些资源是宝贵的参考资料。
(1.10)
并画以
为半径的圆
前面介绍了 dq 轴坐标下电压方程,现在考虑稳态,这里可以先忽略
,稳态的时候
和
不再变化,并把电压方程和磁链方程整合,因此电压方程可以简化为:
(1.11)
首先分析
,也就是表贴电机:
同样,令
(1.12)
代入得:
(1.13)
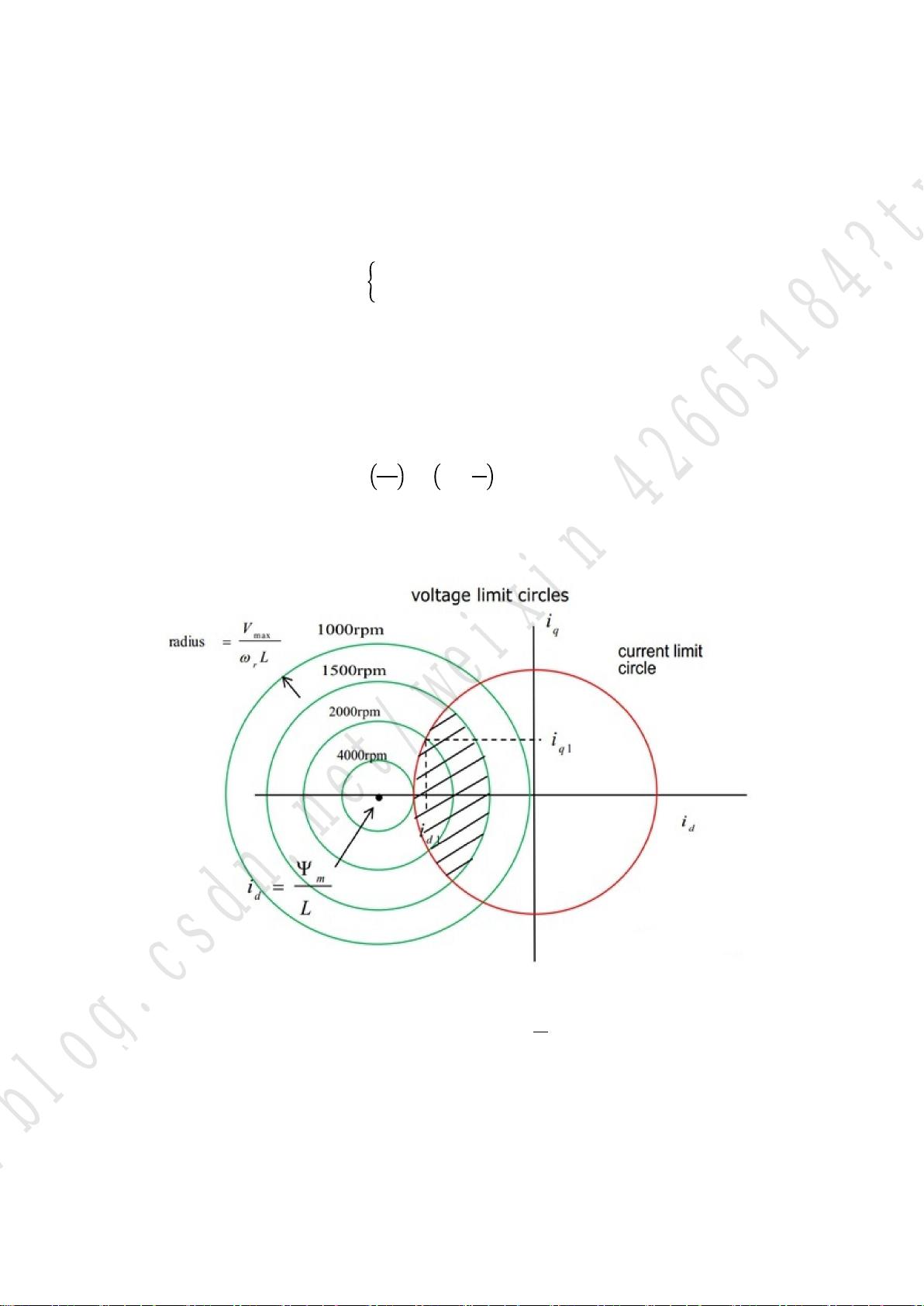
如下图,画出电压和电流的曲线圆:
其中绿色是电压极限圆,红色是电流极限圆。
由上图可得到以下结论:
电压极限圆不是正好在电流坐标系的中心,偏置为
转速越高,电压圆的半径越小
电机必须工作在电压圆与电流圆同时覆盖的区域
当电机转速很低时,电压极限圆很大,电流极限是其主要约束,因此低速下电流可以一直
保持在 iq 为最大值状态,此时称之为恒转矩区,如下图所示的 T1 区。当转速继续上升时,
https://blog.csdn.net/weixin_42665184?type=blog
剩余22页未读,继续阅读
2023-05-25 上传
327 浏览量
2024-04-09 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情


温柔-的-女汉子
- 粉丝: 1096
- 资源: 4084
 我的内容管理
展开
我的内容管理
展开







最新资源
- real-world-react:从头开始的真实世界的React
- aws-code-star:由AWS CodeStar创建的存储库
- 448_Project_1
- lerna-flow
- 布兰迪
- logistics:基于Spring+MyBatis的物流系统,数据库为oracle
- StoreMetadata:hamarb123商店的元数据
- Python库 | msgraphy-0.3.4.tar.gz
- Google Translation API:Google翻译API-开源
- LRH
- ImportantDays:重要日子 - 一个 Android 应用程序
- Shalini-Blue1:蓝色测试1
- mixins:Holochain应用程序(例如用户或锚点)的mixin zomes的集合。 这些都经过审查。 文档在Wiki中
- awesome-blazor-browser:Blazor WebAssembly应用程序,用于浏览“ Awesome Blazor”资源
- 电子功用-双轴承电气柜集线束胶带缠绕系统
- To1 Express-crx插件
