场景图分割驱动的混合式多视图大范围三维重建方法
版权申诉
50 浏览量
更新于2024-06-27
收藏 713KB DOCX 举报
本文档探讨了一种创新的混合式多视图三维重建方法,该方法特别关注于解决大范围场景图分割在三维重建中的挑战。多视图三维重建是一个关键的计算机视觉技术,它依赖于从不同视角拍摄的照片,通过一系列复杂的步骤如特征点匹配、相机定位、三角测量和光束法平差,重构出场景的三维模型。传统的三维重建方法主要包括增量式、全局式和混合式,每种方法都有其优缺点。
增量式重建,如Bundler和VSFM,虽然精度较高,但在处理大规模数据时,对初始像对的选择和频繁的光束法平差会导致效率低下和计算资源消耗大。文献提到的凝聚聚类算法和分布式处理方法如"一天重建罗马"系统,虽然提高了效率,但仍存在场景完整性问题。
全球式重建则通过一次性同时处理所有相机,避免了累积误差,对于大范围场景重建具有高效性。然而,这可能需要对整个场景图有较强的先验知识,并且在实际应用中可能存在局部细节处理上的不足。
作者提出的混合式方法结合了增量式和全局式的优点,旨在解决这些问题。它可能是通过场景图分割,将大范围场景划分为小区域,然后在每个区域内进行增量式重建,同时保持全局信息的更新。这种方法可能利用了局部优化(增量式)来提高精度,又通过全局信息的整合来避免误差累积和提高整体重建的完整性。
具体实施可能包括:首先,对场景进行高效的图分割,选择合适的视图和像对;其次,在局部区域进行增量式重建,通过重三角测量和BA优化,确保局部结构的精确性;再次,将这些局部重建结果合并,形成全局一致性;最后,利用光束法平差和其他优化策略,调整相机参数和场景模型,提升整体重建质量。
这种方法可能具有以下特点:
1. **适应性强**:能处理不同尺度和复杂度的场景。
2. **效率提升**:通过局部处理减少全局优化的次数,提高重建速度。
3. **精度和稳健性**:通过混合策略平衡精度和稳定性,尤其是在处理大范围数据时。
4. **完整性改进**:通过全局图结构维持场景的连续性和一致性。
总结来说,这种混合式多视图三维重建方法为大范围场景图分割提供了一种潜在的有效解决方案,有望在文物保护、自动驾驶等领域发挥重要作用。通过巧妙融合增量式和全局式的优势,它有望成为未来三维重建技术的一个重要分支。
Levenberg-Marquardt 算法是目前进行 BA 全局优化问题最常用的算法, 它能够充分利
用多视图几何矩阵的稀疏性, 进行舒尔补问题求解.目前, Ceres solver 库
[34]
中集成了该算法,
能够适用于各种非线性优化问题的求解.本文也采用该方法进行 BA 优化.除在子场景图混合
式场景中使用 BA 优化外, 在完成子模型合并后, 还需要对整个重建场景进行 BA 优化.
2. 场景图分割
2.1 分割原则
1) 大小适宜:分割应尽量满足每个子场景图中的相机数量适中, 各个子场景图中相机
数目接近, 但不必相等.首先, 大小适中的影像集可以有效地避免反复 BA 优化和可能的偏
移现象, 同时, 使重建系统不受计算资源限制; 其次, 各子场景图中影像数目接近能够提高
系统的可扩展性, 并能够在一定程度上提高效率.综上所述, 场景图分割应满足以下条件:
{∀Γk∈Γ,∀Γi,Γj∈Γ,Num(Ck)≤H0|Num(Ci)−Num(Cj)|≤L0{∀Γk∈Γ,Num(Ck)≤H0∀Γi,Γj∈Γ,|Num(Ci)−Num(Cj)|≤L0
(1)
其中, H0H0 与 L0L0 分别为子场景中影像数目上限与影像数目差值下限.随着集群影像
数量的增加, 由局部增量式 SFM 计算得到的重投影误差首先显着下降, 然后趋于稳定.因此,
子场景图中影像数目可在较大范围内变化, 本文选择 H0=500,L0=150H0=500,L0=150 来进
行精度和效率之间的平衡.
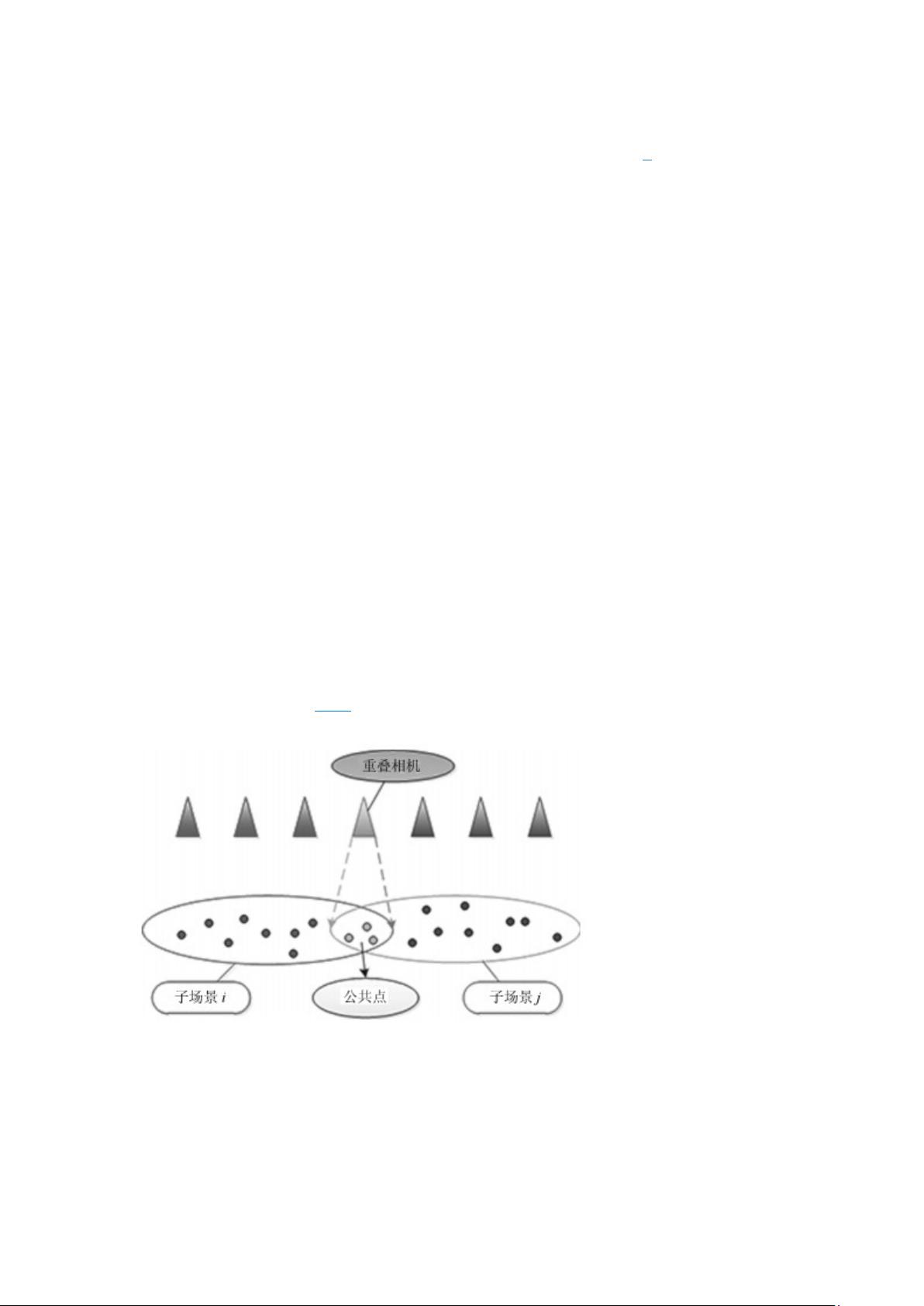
2) 场景完整性:引入场景的完整性主要是保证相机与相机之间的有效连接, 从而确保
子场景重建后, 子模型与子模型能够完整拼接.为保证重建的完整性, 本文在子场景图之间
设置一定的重叠相机, 如图 3 所示.但重叠相机的数目不宜过多, 否则会影响计算效率, 且
难以满足子场景图的大小约束.本文在后续重建中选择重叠影像的数目 NO=40NO=40.
图 3 子场景分割示意图
Fig. 3 Diagram of Sub-scene Relationship
剩余20页未读,继续阅读
2022-06-06 上传
2022-11-29 上传
2022-11-03 上传
2022-05-29 上传
256 浏览量
257 浏览量

罗伯特之技术屋
- 粉丝: 4570
 我的内容管理
展开
我的内容管理
展开







最新资源
- 足球模拟标记语言FerSML开源项目发布
- 精选awesome twitter工具列表:提升社交媒体管理效率
- 自制汇编语言计算器:基础运算与存储功能
- 泰迪科技数据产品分析及PowerBI可视化教程
- Elasticsearch聚合值过滤的实现方法
- Android网络通信组件EasyHttp:全面支持Get/Post及下载上传功能
- React元素平移组件:实现Google Maps式DOM操作
- 深入浅出Ajax开发讲义与完整源代码分析
- Vue.js + Electron打造的Twitter客户端功能全面上线
- PHP开发威客平台源码分享:前端后端及多技术项目资源
- 掌握XSS防护:使用xssProtect及核心jar包
- zTree_v3树形结构和拖拽效果的演示与API文档
- Matlab运动检测与测速GUI程序详解与打包指南
- C#中GridView Eval()方法实现数据格式化详解
- Flex快速入门到精通的电子资源与源码
- gulp与Maven结合的示例项目实践指南
