Buck变换器滑模控制研究:二重积分滑动面与PWM策略
183 浏览量
更新于2024-08-31
2
收藏 484KB PDF 举报
"该文研究了基于二重积分滑动面的Buck变换器滑模控制策略,通过状态空间平均法建立数学模型,考虑了电容和电感的串联等效电阻,以此提高模型的准确性。在此基础上,设计了PID控制和基于二重积分滑动面的PWM滑模控制。在负载突变情况下,二重积分滑动面的PWM滑模电流控制表现出更优的动态响应和稳态误差调节性能。"
基于二重积分滑动面的Buck变换器滑模研究深入探讨了非线性控制理论在电力电子变换器中的应用。Buck变换器是一种常见的直流-直流变换器,广泛应用于电源系统中。为了应对输入电压、负载变化和工作环境的不确定性,控制策略的优化至关重要。
首先,文章采用状态空间平均法来构建Buck变换器的数学模型。这是一种有效的分析方法,可以将开关电路的瞬态行为转换为连续时间系统,简化了分析并提高了模型的准确度。在模型中,不仅考虑了电容电压和电感电流,还考虑了电容和电感的串联等效电阻,以更全面地描述实际电路的行为。
接着,论文提出了两种控制策略:PID控制和基于二重积分滑动面的PWM滑模控制。PID控制是经典的反馈控制方法,通过比例、积分和微分三个部分的组合来调整输出,以减小系统误差。然而,对于具有非线性和不确定性因素的系统,PID控制可能会面临性能限制。
滑模控制则提供了一种更为鲁棒的解决方案,它能确保系统动态行为能够快速且无抖动地跟踪期望状态。本文采用的二重积分滑动面设计增强了滑模控制的性能,通过电流信息来引导控制器,使其在负载突变时具有更好的动态响应和稳态误差调节能力。相比于传统的基于滞环调制的滑模控制,PWM滑模控制具有固定的开关频率,减少了滤波器设计的困难,同时也改善了调节性能。
通过仿真对比,验证了基于二重积分滑动面的PWM滑模控制在负载突变情况下的优越性。这种控制策略能够在保证系统稳定性的同时,提供更快的响应速度和更小的稳态误差,这对于现代变换器系统的需求至关重要。
总结来说,本文的工作为Buck变换器的控制设计提供了新的视角,特别是对于复杂工作条件下的动态性能和稳态精度的提升,展示了滑模控制在电力电子领域的潜力和价值。未来的研究可能进一步探索如何优化滑动面设计,以及如何将这种方法扩展到其他类型的电力变换器中。
基于二重积分滑动面的基于二重积分滑动面的Buck变换器滑模研究变换器滑模研究
利用状态空间平均方法建立了Buck变换器的数学模型,该模型考虑了电容和电感的串联等效电阻,仿真结果与
电路模型的仿真结果基本一致,其准确性较高;基于该数学模型,分别设计了PID控制和PWM滑模控制,滑模
控制基于二重积分滑动面,并利用了电流信息。仿真结果表明,在负载突变情况下,基于二重积分滑动面的
PWM滑模电流控制具有更好的动态响应特性和稳态误差调节特性。
0 引言引言
随着现代变换器系统的逐渐发展,系统的控制要求和精度日益提高,在输入电压、负载、工作环境等参数大范围变化条件
下,变换器的控制方法研究成为了需要重点关注的问题。
滑模控制方法
[1]
是一种典型的非线性控制方法,它可以迫使被控系统的动态能够精确跟踪预设期望状态,具有很好的鲁棒性
和稳定性。
传统的滑模控制方法基于滞环调制,结构简单,易于实现,但是这种方法开关频率受负载变化和输入电压的影响比较大,
不利于滤波器的设计,可能还会导致调节性能恶化。定频PWM调制
[2-3]
基于等效控制的思想,将PWM调制中的占空比等效为
滑模控制律,无论占空比怎样变化工作频率都不受影响,利用等效控制律与斜坡信号相比较来实现开关通断,能有效解决这个
问题。
迄今为止,已有许多学者将
为了提高滑模控制方法的动态响应特性和稳态调节性能,本文结合Buck电路的状态空间平均模型,设计了基于
1 基于状态空间平均法的变换器建模基于状态空间平均法的变换器建模
状态空间平均法是一种以矩阵方程的形式描述系统的建模方法,包括状态方程和输出方程,如式(1):
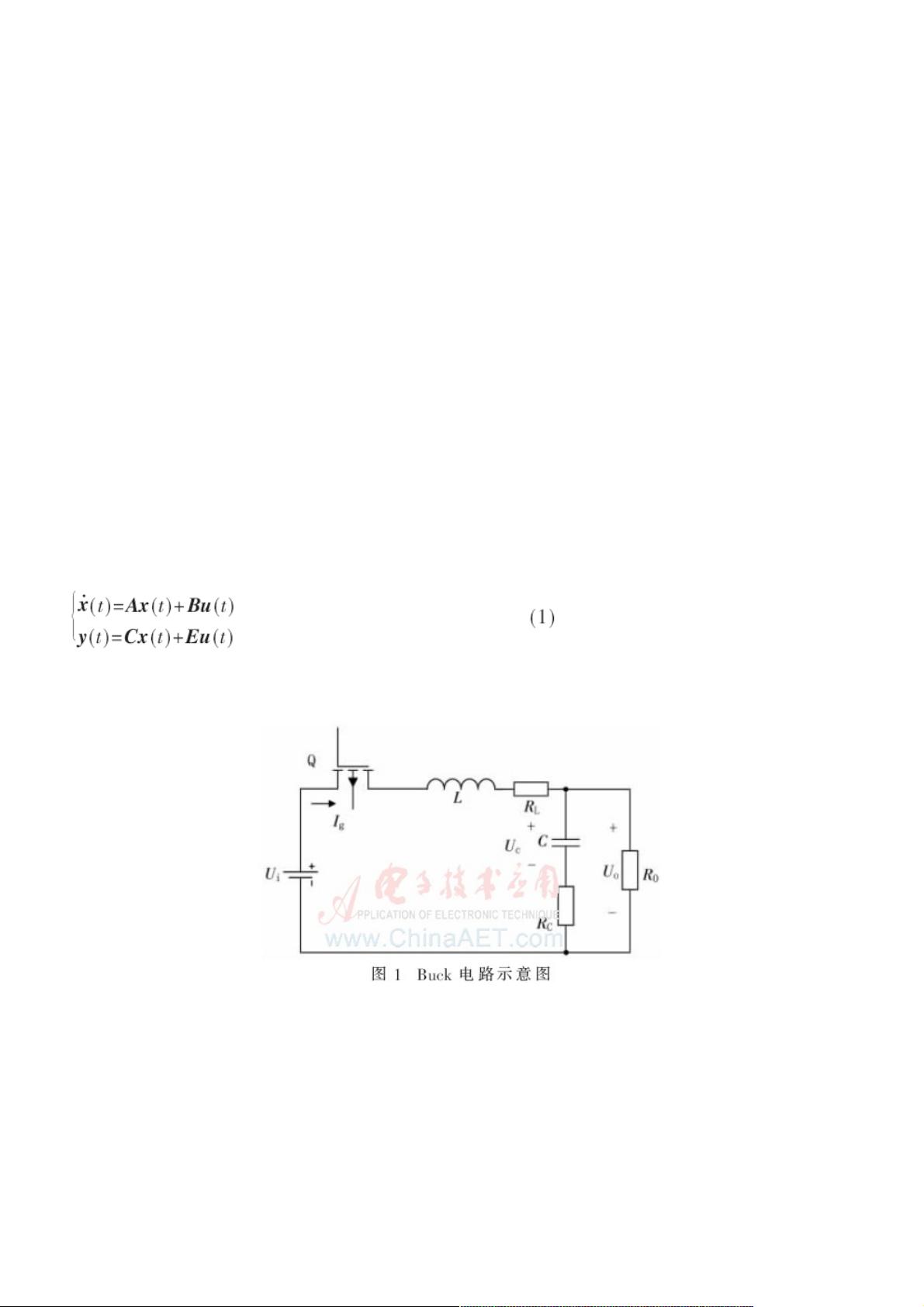
针对不同模态分别列出状态方程后,在一个周期内求平均,可以得到最终的状态空间平均模型。图1所示为Buck电路示意
图。
选择电感电流i
L
(t)和电容电压U
C
(t)为二维状态变量X(t);选择输入电压为U
i
输入变量,u(t)=U
i
;选择电压源输出电流i
g
(t)和
输出电压U
o
(t)为二维输出变量Y(t)。为保证模型准确性,建模时考虑电容等效电阻R
L
和电感等效电阻R
C
。
1.1 大信号模型大信号模型
Buck电路按照工作状态分有两个模态,如图2。
下载后可阅读完整内容,剩余6页未读,立即下载
2024-05-30 上传
2022-12-22 上传
2019-08-12 上传
2023-02-23 上传
2021-05-22 上传
2019-08-13 上传
2019-08-13 上传
2019-08-12 上传
2019-08-13 上传

weixin_38640150
- 粉丝: 3
- 资源: 909
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
