六足机器人运动分析与智能路径规划策略
版权申诉
DOC格式 | 3.52MB |
更新于2024-06-23
| 72 浏览量 | 举报
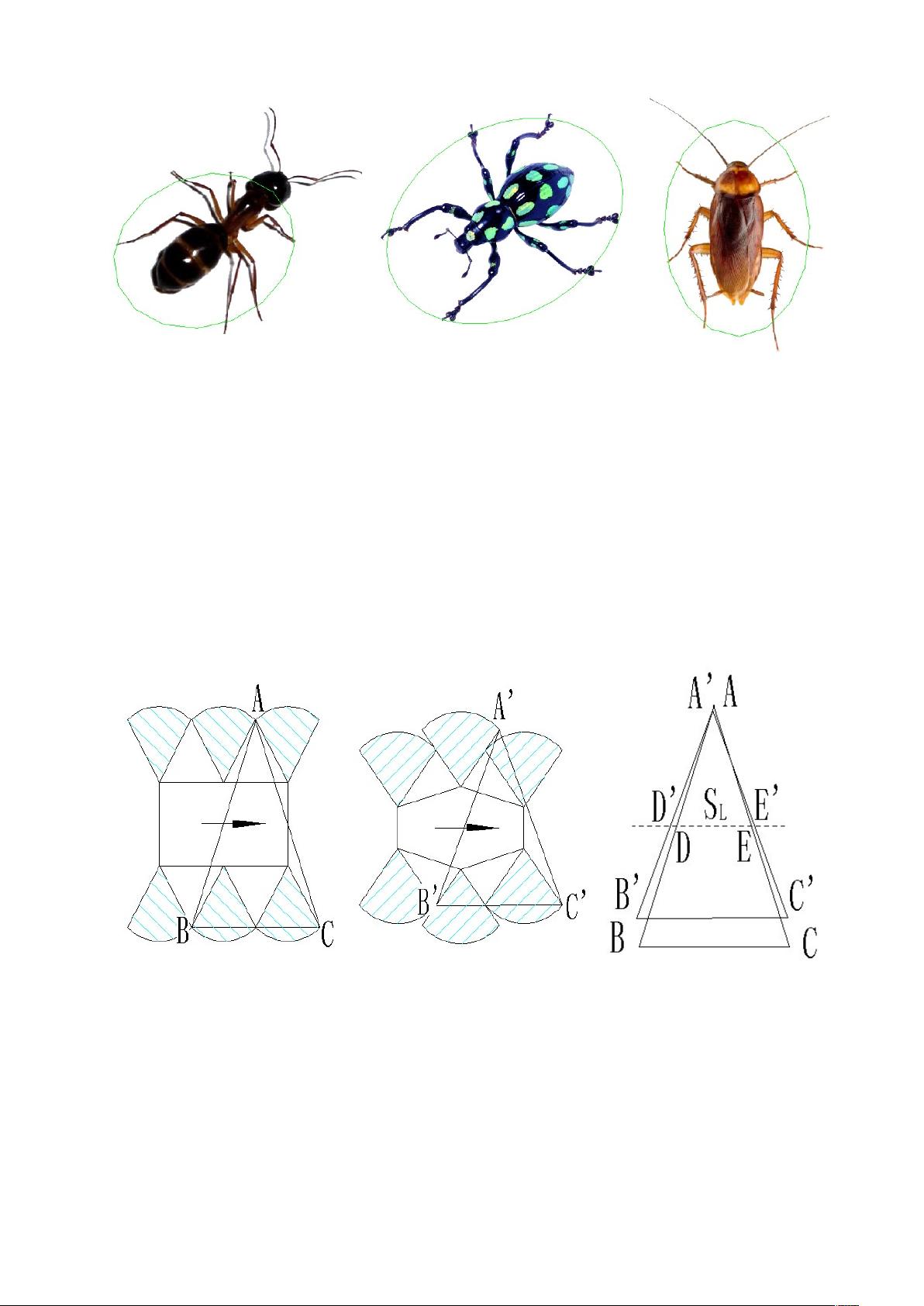
本文主要探讨了六足步行机器人的关键技术,包括运动分析和路径规划。六足机器人因其出色的机动性和高适应性,能在各种复杂环境中执行任务,这使其在科学研究和实际应用中具有重大价值。本文首先从机械结构设计的角度出发,选择了椭圆形的身体布局,这是基于昆虫的生理特性和运动模式进行的。通过深入研究,作者着重分析了这种布局下六足机器人在三角形步态下的爬行稳定性,这对于保证机器人在行走过程中的稳定性至关重要。
接着,论文涉及了运动学分析,特别是解决机器人步行足的正逆运动学问题。正逆运动学有助于理解机器人的关节如何转化为末端执行器(如足端)的动作,这对于精确控制和规划足端轨迹至关重要。通过MATLAB的仿真研究,作者发现采用六次多项式函数来描述足端轨迹,能够实现良好的运动性能,这在实际操作中可以提高机器人的灵活性和精度。
路径规划是六足机器人的重要组成部分,文章中提到了两种主要的方法——人工势场和蚁群算法。人工势场作为一种传统的寻优策略,利用势场的概念引导机器人寻找最有利的路径,而蚁群算法则是一种基于群体行为的优化算法,模仿蚂蚁寻找食物的行为。作者将这两种算法进行融合和改进,旨在结合它们的优点,提高路径规划的效率和智能化水平。
通过MATLAB的仿真实验,作者验证了改进后的路径规划算法的有效性。实验结果显示,该算法在处理复杂的环境障碍和动态变化的地形时,能够实现更高效、更智能的路径规划,从而确保六足机器人在执行任务时能够避开障碍,实现安全、稳定的运动。
本文围绕六足步行机器人的关键技术和理论问题展开深入研究,从机体设计、步态规划、运动学分析到轨迹规划,为这类机器人的研发提供了实用的理论支持和方法论指导。这一研究不仅推动了六足机器人技术的发展,也为其他多足机器人以及相关领域的研究提供了有价值的参考。
的布置,腿的配置合理与否直接影响到机器人的整体性能。
2.1 仿生六足机器人机构模型
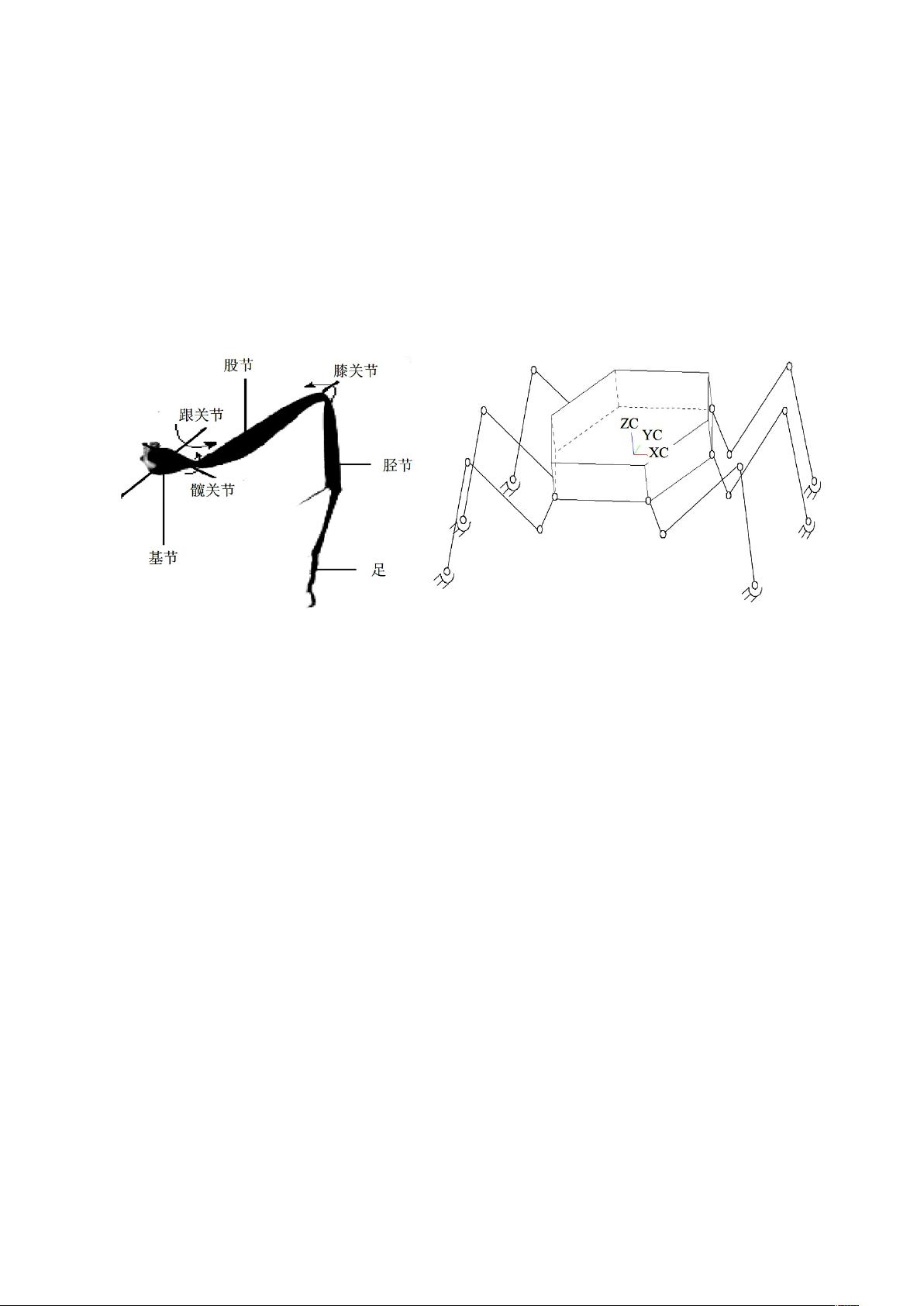
生活中,如果用心观察大量的“六足纲”昆虫(蟑螂,蚂蚁等),我们容易发现昆
虫的六足成对称分布,每条腿有 4 个关节,分别为根关节、髋关节、膝关节和踝关节,
其中前 3 个关节为驱动关节,各关节之间的连杆分别称为基节、股节和胫节,如图 2-1
所示。本设计基于六足昆虫的外形,经过合理的简化,把六足步行机器人设计成如图 2-2
所示的模型。
图 2-1 昆虫腿部结构示意图
图 2-2 六足机器人模型
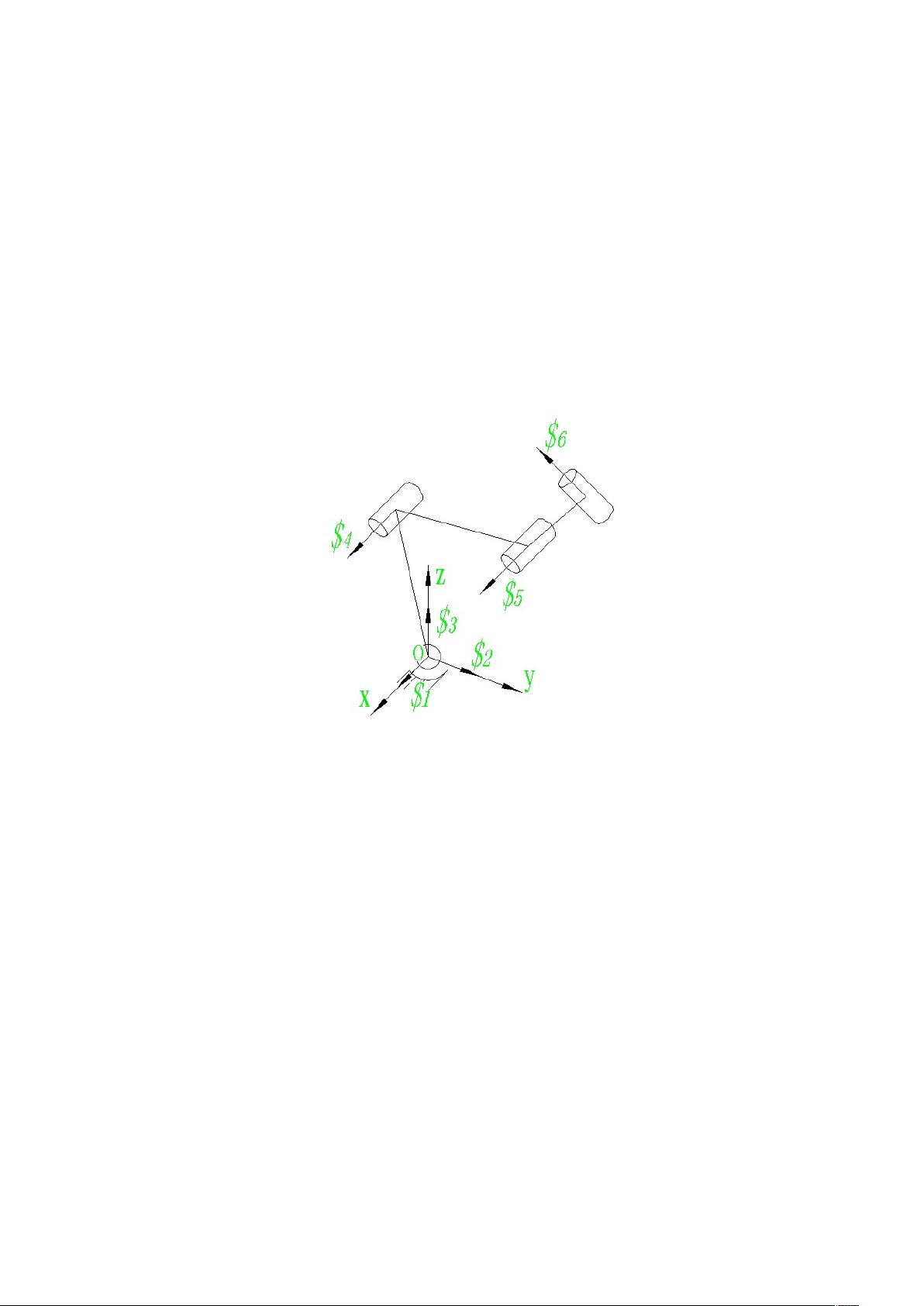
2.2 基于螺旋理论的机构自由度分析
螺旋﹩(s;s
0
)由两个矢量对偶组成,也可用 Plücker 坐标表示为(L,M,N;
P,Q,R),(L,M,N)和(P,Q,R)分别代表了矢量 s 和矢量 s
0
。这里,s 代表空
间一个矢量,称为对偶矢量原部
0
0
h= +s s s
表示了该矢量在空间的位置,其中
0
r s= ´s
称为对偶矢量的对偶部,是由原点至该空间矢量任一点的矢径,
0
h /= s s s sg g( )
称为螺旋
的节距
[11]
,是原点不变量。当 h=0 时,螺旋退化为线矢量,当 h=∞时,螺旋退化为自
由矢量,也称为偶量,其在空间只有方向而没有位置的概念。机构的所有运动副都可以
用移动副和转动副单独表示或者组合而成,而移动副和转动副则可分别用移动速度偶量
和角速度线矢量来表示。如果两螺旋﹩和﹩
r
满足﹩◦﹩
r
=0 时,则称﹩和﹩
r
互为反螺旋。
式中“◦”表示互易积。对于运动螺旋来说,其反螺旋表示机械系统对物体的约束。
仿生六足机器人在正常行走条件下,假设各支撑腿与地面之间不存在滑动现象,因
此可以简化为点接触,即相当于机构学上的 3 自由度球面副。另外,根关节、髋关节及
膝关节都相当于单自由度转动副。因此,整个机构的自由度可由下面的公式
[11]
计算:
1
( 1)
g
i
i
M d n g f v
=
= - - + +
å
(2-1)
这里,M 表示机构的自由度;d 表示机构的阶数,它依赖于公共约束,d=6-λ;λ
表示公共约束;n 表示包括机架的构件数目;g 表示运动副的数目;f
i
表示第 i 个运动副
的自由度;v 表示并联冗余约束,它等于在去除公共约束的因素后的独立冗余约束的数
剩余59页未读,继续阅读
相关推荐





omyligaga
- 粉丝: 101
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
