自适应权值Census-Hamming距离立体匹配算法研究
183 浏览量
更新于2024-08-31
收藏 505KB PDF 举报
"基于Census变换的自适应权值Hamming距离立体匹配算法"
立体匹配是计算机视觉中的核心问题,主要用于获取场景的深度信息,广泛应用于机器人导航、三维重建和智能驾驶等领域。传统的立体匹配算法,如SAD、SSD和NCC,容易受到光照变化和图像畸变的影响。为了解决这些问题,Census变换被提出,它通过比较窗口内像素的相对顺序关系来生成稳健的特征描述符,增强了对光照变化的鲁棒性。
Census变换的计算过程可以描述为:对于图像中的每个像素点P(u, v),将其周围n×m大小的窗口st内的像素值与中心像素值P(u, v)进行比较,形成一个二进制编码。这个编码能够保留像素的相对顺序,即使在亮度变化下,相同结构的区域也能得到相同的编码,从而提高了匹配的稳定性。
然而,Census变换结合传统的Hamming距离计算匹配代价时,所有邻域像素被等同对待,这可能导致匹配信息不足,增加误匹配概率。为了解决这个问题,该文提出了一种自适应权值的Hamming距离算法。算法引入了邻域像素的空间距离,根据像素到中心像素的距离进行分等级计算,使得匹配信息更加丰富。此外,使用梯度图像中像素间的距离作为计算代价的权重,增强了对噪声的抗干扰能力,并能更好地反映图像的纹理信息。
为了进一步优化算法效率,文章引入了稀疏聚合窗口,降低了算法的复杂度。传统的聚合窗口可能包含大量无关像素,稀疏窗口则只考虑与中心像素相关性高的像素,这样既减少了计算量,又保持了匹配精度。最后,通过亚像素插值技术提高匹配精度,使得立体匹配结果更加精细。
实验结果显示,该算法在提高匹配准确性和抗干扰性的同时,降低了算法的复杂度,适合于实时的立体匹配应用。在弱纹理区域,该算法表现出更高的精确性,无需额外传感器辅助,对于机器人和自动驾驶等实时应用场景具有显著优势。
基于Census变换的自适应权值Hamming距离立体匹配算法通过一系列创新改进,有效提升了立体匹配的性能,降低了误匹配率,增强了算法的实时性和鲁棒性,为实际应用提供了强有力的支持。
基于基于Census变换的自适应权值变换的自适应权值Hamming距离立体匹配算法距离立体匹配算法
传统的Census+Hamming距离立体匹配算法往往由于将邻域像素等同对待,从而缺少足够的匹配信息,造成较
高的误匹配率。对此提出了一种自适用加权的Hamming距离算法,通过引入邻域像素空间距离,使在距离测算
时将邻域像素分等级计算,丰富了匹配图像的信息。并且使用梯度图像像素之间的距离作为聚合代价计算的权
值,实验证明其对于噪声有一定的抗干扰性,并且能够很好地反映纹理等信息,同时引入稀疏聚合窗口来减少
算法的复杂度。最后进行亚像素插值增大匹配的正确性。通过对比试验证明,此算法不仅能够提高匹配的准确
性和抗干扰性,还能减少算法的复杂度,适用于实时的立体匹配。
0 引言引言
现如今随着人工智能的发展,用于获取三维信息的立体视觉算法变得越来越重要,目前已经提出了很多立体视觉的算法,
并且成功应用于机器人导航
[1]
、现实环境中三维重建
[2]
以及智能车辆障碍物的检测
[3]
等。然而,现在多数的实时立体视觉对于
弱纹理区域缺少足够的精确性,以至于还需要其他的传感器来辅助检测这些障碍物。
立体视觉匹配算法一般分为:全局匹配算法和局部匹配算法,本次主要针对局部匹配算法。通常的局部匹配算法(如:像素
差绝对值(SAD)、像素差平方和(SSD)归一化互相关(NCC)等)往往对畸变引起的图像失真较为敏感,为此ZABIN R和
WOODFILL J
[4]
提出了Census和Rank变换。文献[5]提出将图像的梯度图引入
1 传统的传统的Census变换与初始匹配代价计算变换与初始匹配代价计算
传统Census变换对于亮度变化具有很高的鲁棒性。Census变换的函数如式(1):
其中,P(u,v)为中心像素值,s
t
为变换窗口,大小为n×m。Census变换匹配算法的处理速度很大程度上取决于变换窗口s
t
的
大小,窗口越大,匹配的准确率越高,相反其视差连续性越差,处理的时间也就越长,所以选择合适大小的窗口也是很重要的
问题,本文将在第4节进行试验,获得最佳窗口大小。
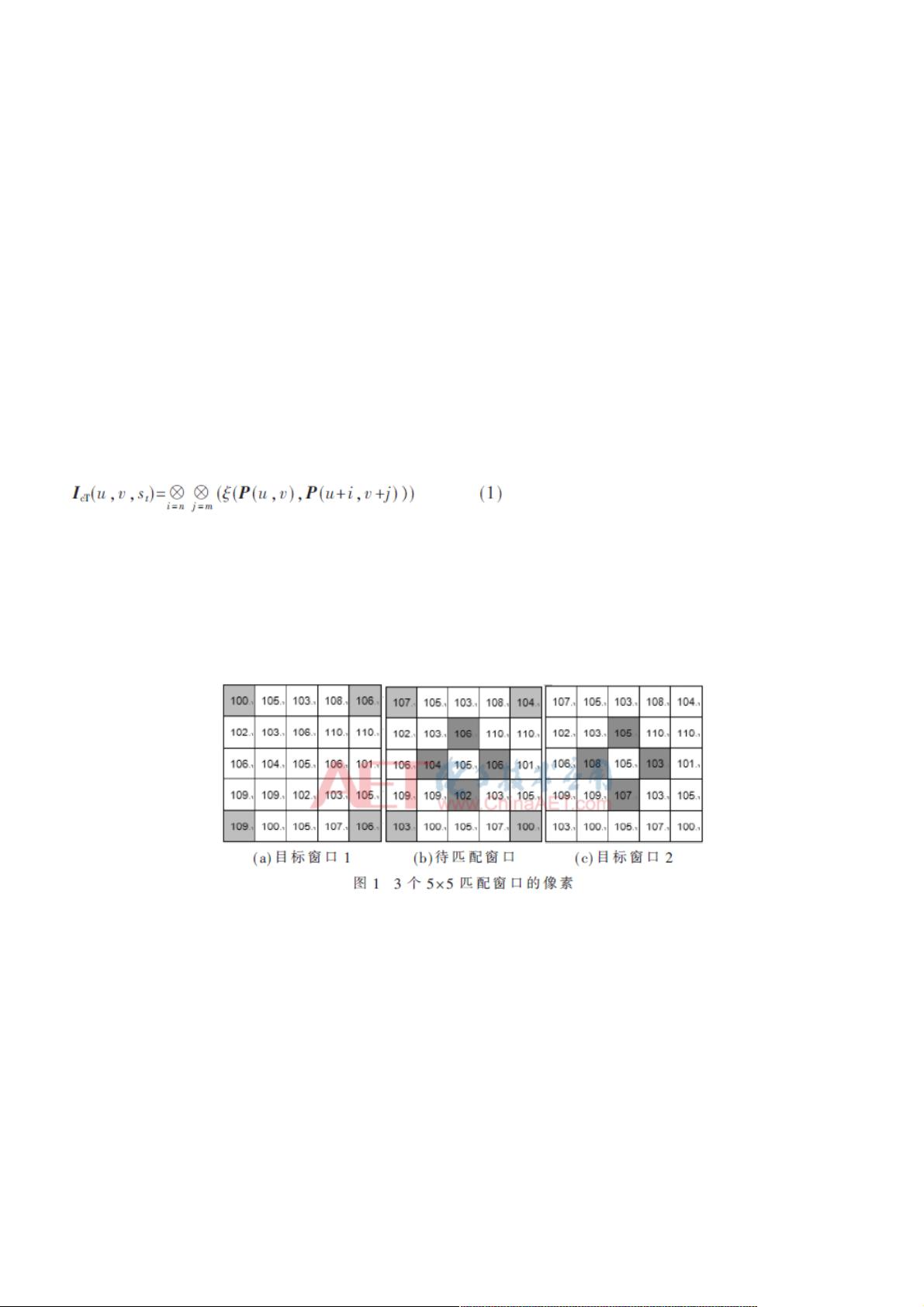
传统Hamming距离并没有考虑邻域像素与中心像素的空间距离关系,而将像素邻域的所有像素无偏差地处理,很容易造成
误匹配,如图1所示两个像素窗口并不匹配,但是计算他们的Hamming距离的结果显示这两个窗口匹配。而本文提出的一种新
的距离计算方法能够解决这个问题。
2 改进的改进的
本文提出的初始匹配代价计算方法并不是完全使用Census变换之后的比特串。首先根据式(2)计算两个窗口之间的距
离,也就是初始匹配代价e
cTN
:
下载后可阅读完整内容,剩余4页未读,立即下载
2014-02-27 上传
2020-07-25 上传
2021-02-12 上传
2021-03-28 上传
2021-01-26 上传
点击了解资源详情

weixin_38746293
- 粉丝: 156
- 资源: 1041
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
