风力发电机故障诊断与容错控制研究
"Fault Diagnosis and Fault-Tolerant Control of Wind Turbines by Thomas Esbensen and Christoffer Slot from Denmark focuses on enhancing the reliability and reducing repair costs in wind turbines through advanced fault diagnosis and fault-tolerant control strategies."
在风力发电领域,由于许多风力涡轮机安装在偏远地区,故障诊断和容错控制成为提升设备可靠性和降低维修成本的有效途径。该项目由Thomas Esbensen和Christoffer Slot两位学者进行,他们隶属于丹麦的电子系统系自动化与控制科。研究中,他们采用了一个4.8兆瓦的虚构但具有现实性的风力涡轮机模型,以此为基础建立动态模型。
首先,进行了故障分析,旨在识别可能的组件故障的发生频率及其对最终效果的严重性。接着,针对最具影响力的重大故障,应用了诊断和补偿方法。这些方法的实施有助于提前发现和应对潜在的问题,从而提高系统的稳定性和效率。
诊断算法基于一个可重构的扩展卡尔曼滤波器结构,这使得能够同时诊断多个故障。对于突发性故障,通常采用假设测试为基础的方法进行诊断;而对于渐进型故障,可能会运用状态监测和数据融合技术来逐步识别其发展过程。
在容错控制方面,设计了能够在检测到故障后调整控制策略的机制,以确保系统能在部分组件出现故障时仍能保持一定程度的功能。这可能包括切换到备用系统、调整控制参数或采用补偿算法来抵消故障影响。
这项工作深入探讨了风力涡轮机的故障诊断和容错控制技术,为实际风能产业提供了理论支持和解决方案,有望改善风力发电系统的性能和经济性。通过这样的方法,不仅可以减少因故障停机带来的损失,还能延长风力涡轮机的使用寿命,进一步推动可再生能源领域的可持续发展。
System Description
Anemometer is used to measure the wind speed. The wind turbine is started when the wind
speed reaches a lower limit, while operation is cut-out when wind speeds become too high.
Brakes can be applied mechanically, electrically, or hydraulically and function as parking
brakes.
Gearbox connects the low-speed shaft to the high-speed shaft, thus increasing the rotational
speed to a level required by the generator to produce electric energy.
Generator converts rotational energy into electric energy. On a modern wind turbine the
maximum power output is typically from a few and up to five megawatts.
High-speed shaft drives the generator.
Hub and rotor blades together make up the rotor of the wind turbine. The hub connects
the rotor blades to the low-speed shaft. Pitching the blades is used to maximize the efficiency
in low winds and reduce efficiency in high winds to protect the wind turbine from structural
damage.
Low-speed shaft connects the rotor to the gearbox.
Nacelle is located atop the tower and contains the gearbox, low- and high-speed shafts,
generator, and brakes.
Tower carries the nacelle and the rotor. Since the wind speed increases with the height, a
taller tower generally enables a wind turbine to generate more electric energy.
Wind vane is used to measure the direction of the wind. The wind direction is used by the
yaw mechanism to orient the wind turbine perpendicular to the wind.
Yaw mechanism uses electrical motors to orient the wind turbine rotor perpendicular to
the direction of the wind.
Having introduced the main components of a wind turbine, the next section describes how a
variable-pitch, variable-speed wind turbine is typically controlled.
2.2 General Control Strategy
The purpose of this section is to explain how a variable-speed, variable-pitch wind turbine is con-
trolled along a typical operating trajectory, and also to explain the variables that are involved in
the control. This is relevant since the fault diagnosis and fault-tolerant control systems are subject
to the conditions in the closed-loop system.
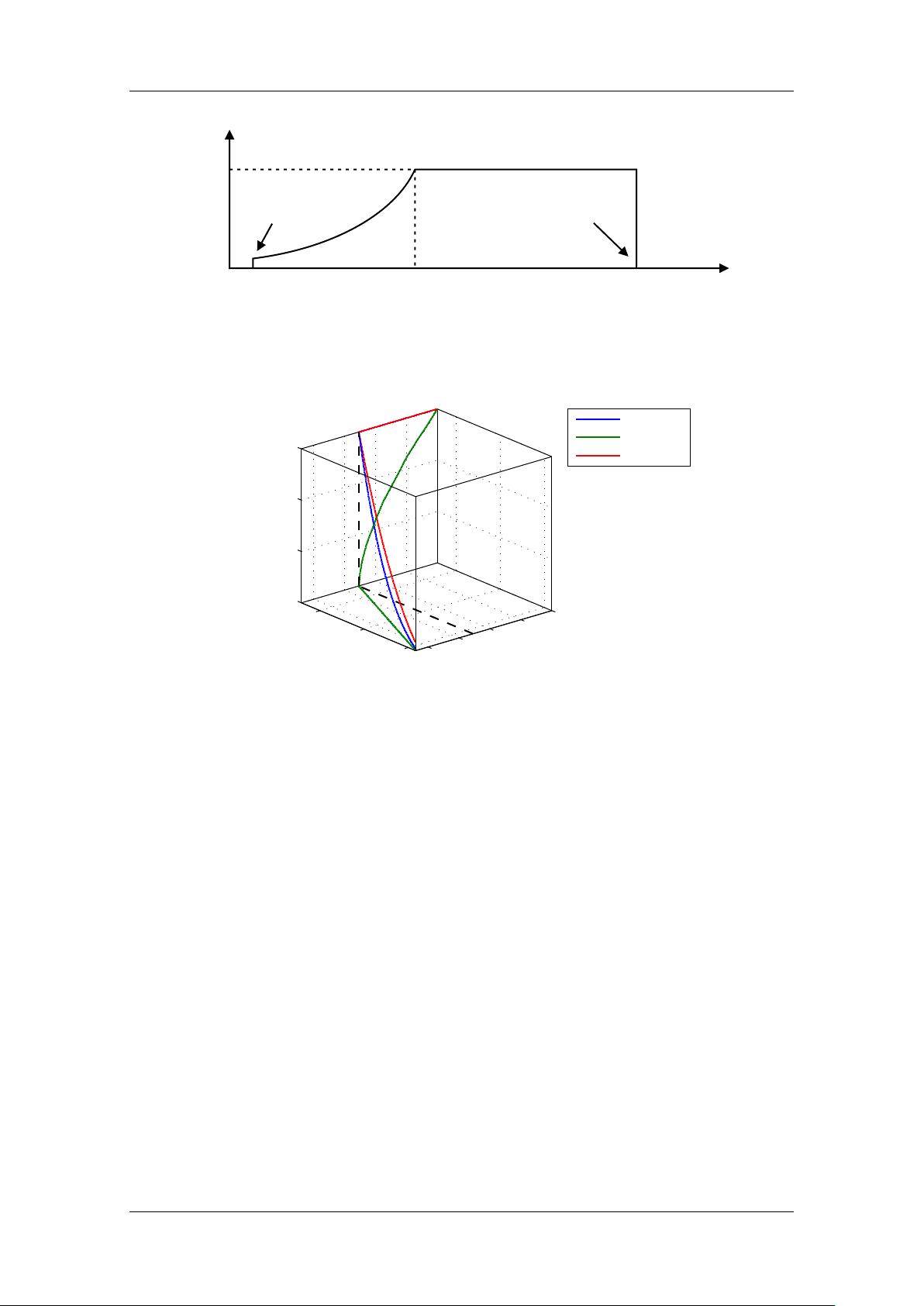
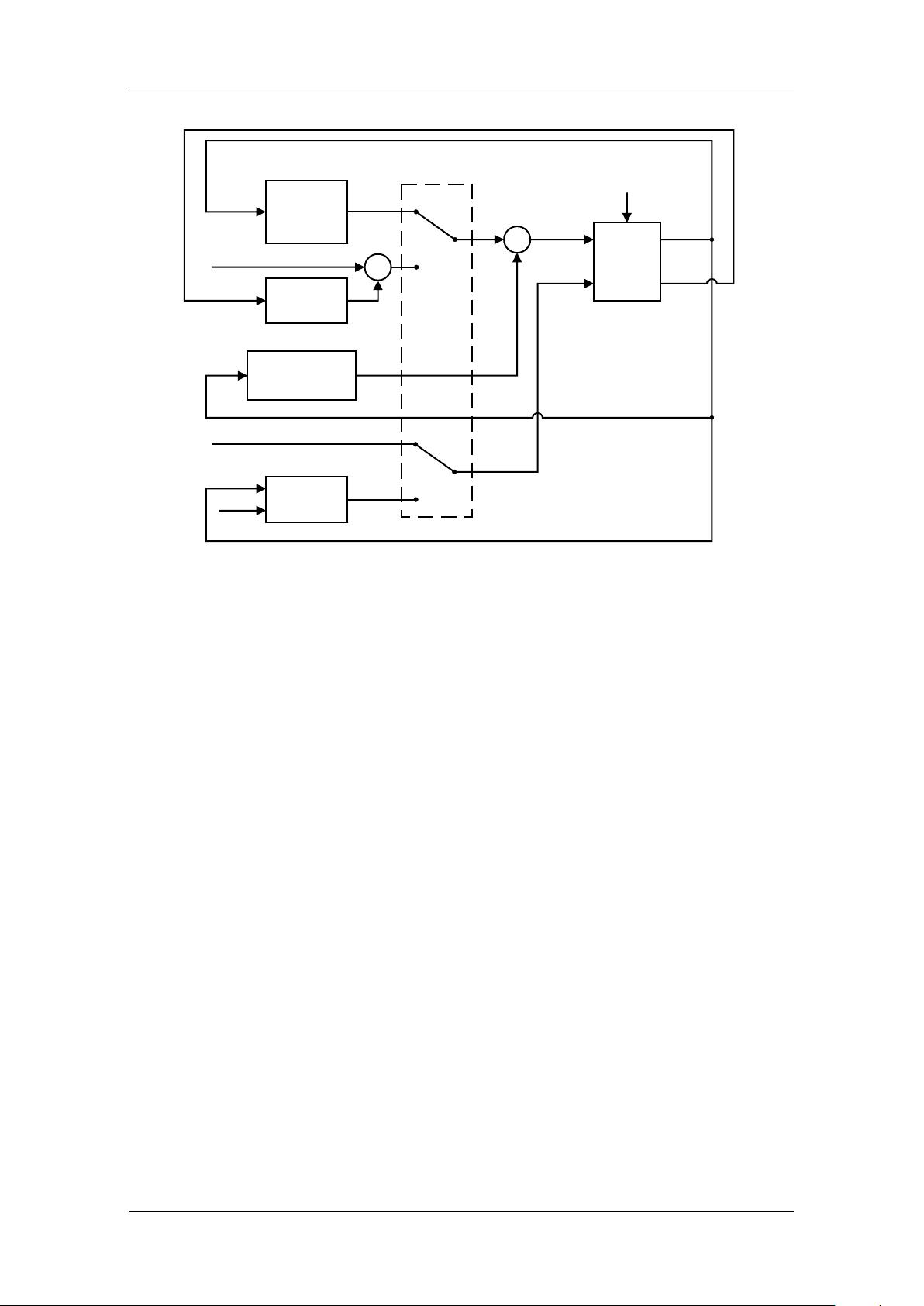
When controlling a wind turbine, the overall target is to minimize the operational cost while
maximizing the generated power. This cost depends on the conditions under which the wind turbine
produces the power, and implies that wind turbines operate along a certain trajectory, as the one
shown in Figure 2.2. This trajectory is obtained using a strategy of control shown in Figure 2.3,
which illustrates the control signals and rotor speed for obtaining the desired output power.
From examining the power curve it is obvious that the wind turbine only produces power in a
limited range of wind speeds, which is further divided into two distinct regions, I and II; denoted
the partial load region and the full load region. At wind speeds below the cut-in speed, V
w,cut-in
,
the wind turbine does not produce any energy since the operational cost exceeds the value of the
produced power. Similarly, no energy is produced when wind speeds exceed the cut-out wind speed,
V
w,cut-out
, where the wind turbine is shut down to protect it from structural overloads. To explain
what happens in the two regions of power production, these are explained separately in the following
numbered list:
Page 6

剩余176页未读,继续阅读
相关推荐






bluegif
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- DeepFreeze密码移除工具6.x版本使用教程
- MQ2烟雾传感器无线报警器项目解析
- Android实现消息推送技术:WebSocket的运用解析
- 利用jQuery插件自定义制作酷似Flash的广告横幅通栏
- 自定义滚动时间选择器,轻松转换为Jar包
- Python环境下pyuvs-rt模块的使用与应用
- DLL文件导出函数查看器 - 查看DLL函数名称
- Laravel框架深度解析:开发者的创造力与学习资源
- 实现滚动屏幕背景固定,提升网页高端视觉效果
- 遗传算法解决0-1背包问题
- 必备nagios插件压缩包:实现监控的关键
- Asp.Net2.0 Data Tutorial全集深度解析
- Flutter文本分割插件flutter_break_iterator入门与实践
- GD Spi Flash存储器的详细技术手册
- 深入解析MyBatis PageHelper分页插件的使用与原理
- DELPHI实现斗地主游戏设计及半成品源码分析
