自由摆平板控制系统设计——N1000060传感器应用
"N1000060中文资料 - SCA60C单倾轴传感器的PDF文档,适用于2011年全国大学生电子设计竞赛的B题——基于自由摆的平板控制系统"
这篇资源主要涉及的是一个针对2011年全国大学生电子设计竞赛的题目,该竞赛要求参赛队伍设计并实现一个基于自由摆的平板控制系统。系统的核心是SCA60C型号的单倾轴传感器,即N1000060。这个传感器在系统中扮演关键角色,它能够检测摆杆的角度变化,并据此控制电机驱动平板旋转,以满足特定的运动要求。
首先,我们要理解这个控制系统的基本构成。摆杆的一端固定在支架上,另一端装有电机,电机的转轴连接平板。当摆杆摆动时,电机需要根据摆动的角度来精确控制平板的转动,确保在摆动过程中平板的旋转与摆杆同步。
**基本要求:**
1. 平板需要随着摆杆的摆动旋转,摆杆每完成一个周期,平板旋转一周,角度误差不超过45度。
2. 在平板上设置平行线,摆动到特定角度后,放置一枚硬币。当摆杆自由摆动时,控制平板使得硬币在5个周期内不掉落,尽量保持在中心位置。
3. 同样条件下,当放置8枚硬币并保持叠放状态,同样要求在5个周期内不掉落。
**发挥部分:**
除了基本要求,竞赛还鼓励创新。例如,可以在平板上固定激光笔,光斑投射到远处的靶子上。当摆杆静止且平板水平时,调整靶子的位置,使得在摆动过程中,光斑能保持在靶子的特定区域,这需要更精细的控制策略和算法。
在这个项目中,参赛队伍需要掌握以下关键知识点:
1. **传感器技术**:理解单倾轴传感器的工作原理,如何读取并处理传感器数据,以及将这些数据转化为控制电机旋转的指令。
2. **电机控制**:学习如何使用电机驱动器控制电机的精确转动,包括速度和角度的控制。
3. **嵌入式系统**:可能涉及到微控制器编程,实现传感器数据的实时处理和电机控制逻辑。
4. **动态控制**:研究如何在摆动过程中稳定平板,以满足硬币不掉落和光斑保持在目标区域的要求,可能需要了解动态平衡和PID控制等理论。
5. **硬件设计**:包括电路设计,确保系统的可靠性和稳定性。
6. **软件开发**:编写控制程序,可能使用C、C++或嵌入式语言,实现算法和用户交互界面。
7. **机械结构设计**:摆杆、支架和平板的结构设计,需要考虑力学稳定性和制造可行性。
此外,参赛队伍还需要遵守竞赛规则,比如团队人数限制、使用资源的规定、身份验证等,确保比赛过程的公平性。这是一个综合性的项目,涵盖了电子、机械、控制等多个领域的知识,旨在考验学生的实践能力和创新能力。
B-1
2011 年全国大学生电子设计竞赛试题
参赛注意事项
(1)2011 年 8 月 31 日 8:00 竞赛正式开始。本科组参赛队只能在【本科组】题目中任选一题;
高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份
的有效证件(如学生证)随时备查。
(4)每队严格限制 3 人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制
作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取
消评审资格。
(6)2011 年 9 月 3 日 20:00 竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
基于自由摆的平板控制系统(B 题)
【本科组】
一、任务
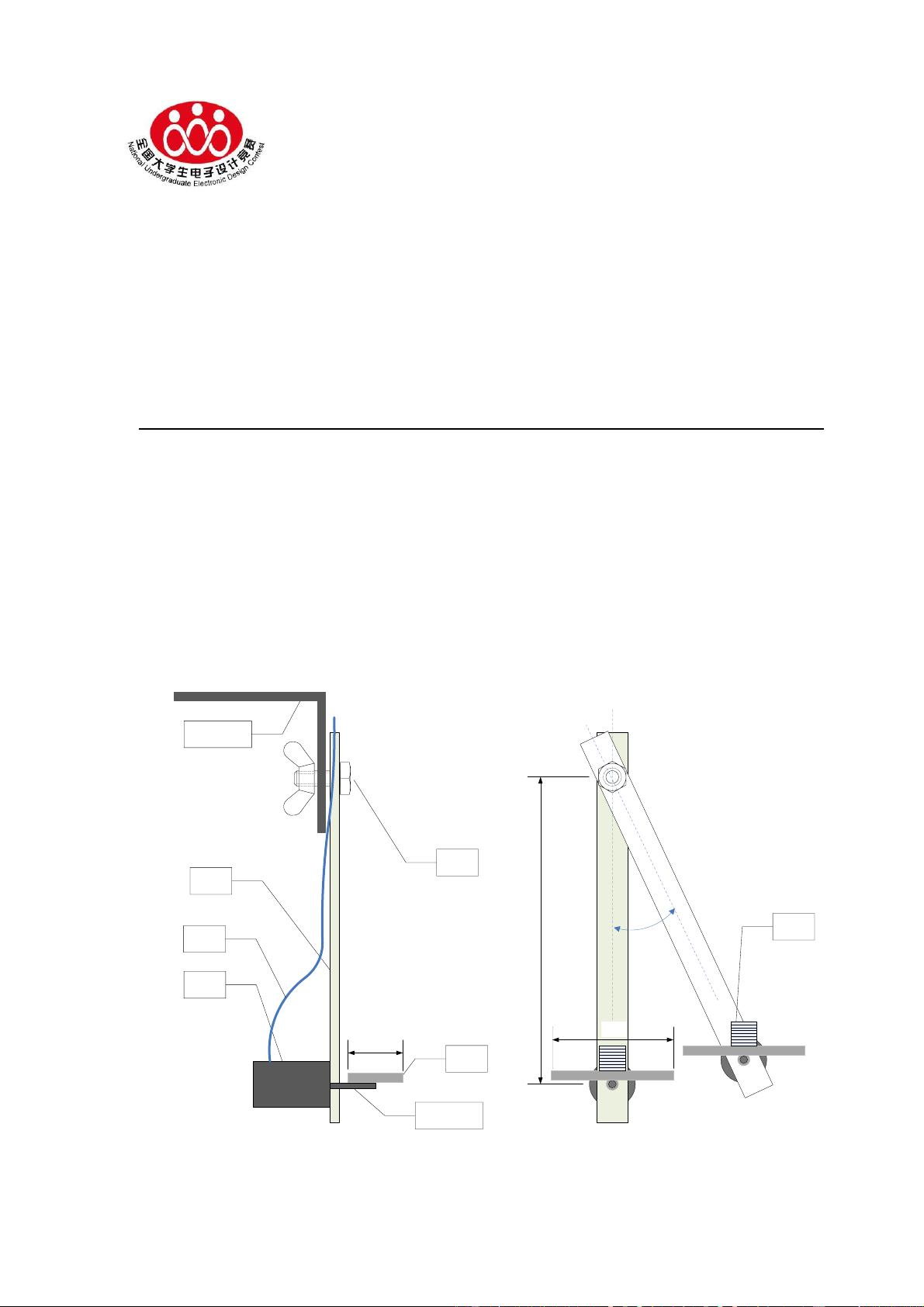
设计并制作一个自由摆上的平板控制系统,其结构如图 1 所示。
摆杆的一端通过转轴固定在一支架上,另一端固定安装一台电机,平板固定
在电机转轴上;当摆杆如图 2 摆动时,驱动电机可以控制平板转动。
电机
平板
摆杆
固定支架
转轴
θ
电机转轴
6cm
10cm
100cm
电线
硬币
图 1 图 2
下载后可阅读完整内容,剩余3页未读,立即下载
364 浏览量
182 浏览量
808 浏览量
点击了解资源详情
点击了解资源详情
524 浏览量

jianfile
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Sybase15系统管理指南:AdaptiveServerEnterprise中文手册
- Sybase15 AdaptiveServerEnterprise 中文系统表手册
- Eclipse IDE详解:从基础到高级设置
- 深入学习Java:Bruce Eckel的第四版思维之书
- Eclipse整合开发工具基础教程详解
- NIOS II 开发教程:从用户指令到DMA与UART实战
- 操作系统的LRU页面置换算法实现
- STL实战指南:提升编程效率与应对挑战
- TMS320C54XX DSP硬件结构与设计解析
- 自编数据结构文本编辑器实现与错误修正
- VC++6.0实现密码学大数加减乘除源代码示例
- Java贪吃蛇游戏实现:SnakeGame.java代码解析
- 适应性外包发展:寻找最合适的技术与策略
- Libsvm与Matlab集成:教程与路径设置详解
- Oracle 10g 数据库基础概念详解
- S3C6410 RISC Microprocessor User's Manual
