CANoe模拟仿真入门指南
版权申诉
7 浏览量
更新于2024-06-18
收藏 2.77MB PDF 举报
"这是关于CANoe仿真模拟的介绍,主要涵盖了CANoe的基础知识、CAPL语言的应用,以及如何在没有交互层的情况下创建仿真等主题。"
本文档是针对CANoe仿真模拟的一个详细介绍,适用于V14.0.0版本,发布日期为2021年1月8日。CANoe是一款强大的汽车电子系统开发和测试工具,尤其在CAN(控制器局域网络)通信方面具有广泛的应用。文档旨在引导用户了解如何利用CANoe进行有效的仿真测试和CAPL编程。
首先,文档阐述了CANoe的基础概念,包括CANoe在模拟环境中的作用,如模拟不同ECU(电子控制单元)之间的通信。例如,为了模拟一个真实的车辆环境,可能需要模拟车轮速度、发动机扭矩、温度、怠速、节气门角度等信号,这些都可以通过CANoe实现。
接着,文档详细介绍了使用CANoe交互层(Interaction Layer)进行仿真。交互层允许用户定义虚拟节点并模拟其发送和接收的CAN消息,以弥补实际测试中缺少ECU的问题。用户可以使用CAN数据库来配置这些虚拟节点,通过CANoe与物理总线(如高speed CAN)接口连接,如VN1610设备,来实现与真实ECU的交互。
然后,文档深入探讨了如何在CANoe中访问信号。这包括对信号的读取、写入操作,这对于构建和验证ECU间的通信逻辑至关重要。此外,文档还讲解了CAPL(CANoe应用编程语言)的使用,CAPL是一种强大的脚本语言,可用于创建自定义的信号处理、测试序列和数据分析。
在CAPL部分,文档分别讨论了信号基础型CAPL、时间控制型CAPL和基于分析的CAPL。信号基础型CAPL用于处理单个信号事件;时间控制型CAPL则允许精确的时间控制,适用于周期性任务和触发事件;而分析用CAPL则可以帮助用户进行复杂的测试数据解析和结果评估。
进一步,文档还涵盖了如何在没有交互层的情况下创建仿真。这对于那些不需要实时交互或只关注特定信号行为的测试场景特别有用。最后,文档提到了自动测试的实现,这是通过CAPL脚本自动化测试序列,提高测试效率和覆盖率的重要手段。
附录部分可能包含了更具体的操作指南、示例代码和其他参考资料,以帮助用户更好地理解和应用CANoe的仿真功能。
这篇文档是CANoe仿真模拟的全面入门教程,不仅讲解了CANoe的基本使用,还深入到CAPL编程和自动测试,为汽车电子系统的开发和测试提供了一套强大的工具集。

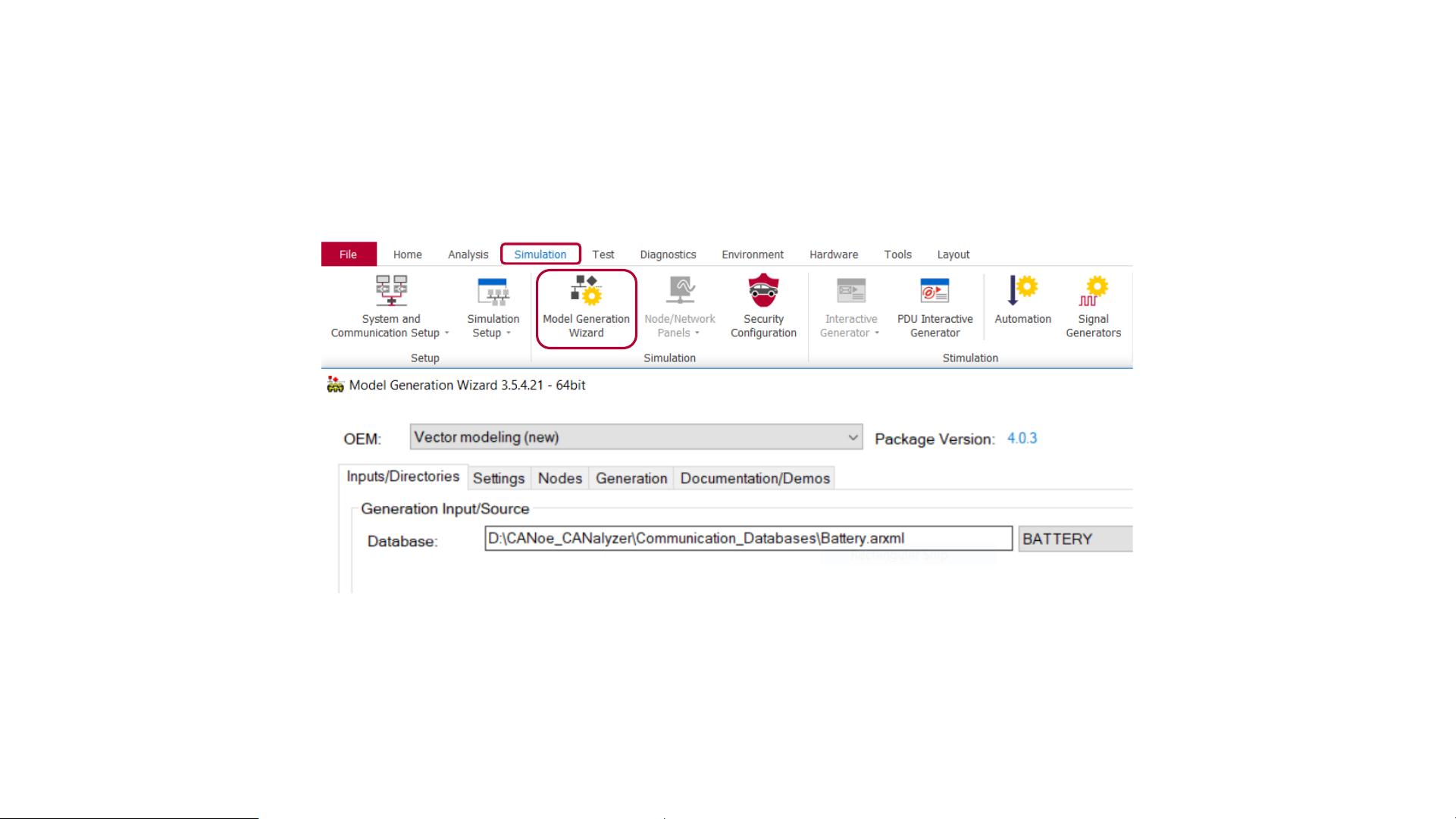
Exercise 1: Simulation with IL (Variant 1)
Simulation with CANoe Interaction Layer
The BPCs shall now be simulated with the help of CANoe. Each participant represents one BPC. The
remaining BPCs are simulated by the trainer.
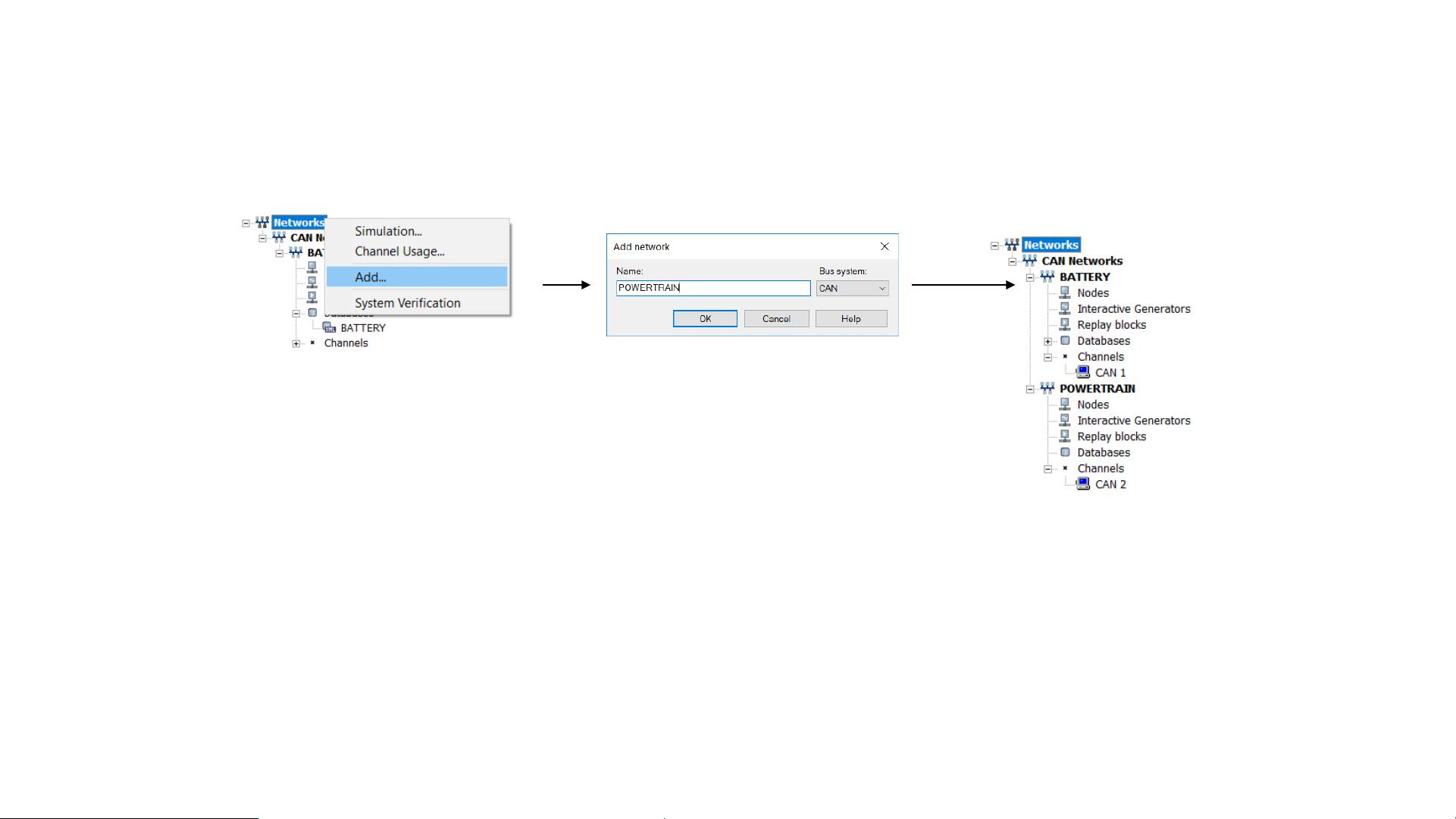
At the end of this task you have created a new configuration which is connected to the PowerTrain on
channel 1 and to the BATTERY on channel 2. Your BPC will be simulated by you.
u Which one is your BPC?
u How can BPCs be recognized that are simulated by several bus participants and why is that harmful?
Important: Add the AsrPDUIL2 (C:\Program Files\Vector CANoe XX.X.XX\Exec32) to your node!
Checklist
□ New configuration created and database added
□ 2 application channels (Ch) and networks available: Ch1: CAN 500kBaud; Ch2: ISO CAN FD 500kBaud, 2000kBaud
□ Network node inserted in network 2
□ Your DB node (BPC_NN) assigned to the network node
□ Interaction Layer AsrPDUIL2 from the folder Exec32 added
□ Result checked on bus: frmStateBPC_NN is sent, bus traffic of TrainingCar available
16

剩余105页未读,继续阅读
2022-09-20 上传
2022-07-15 上传
2021-09-28 上传
2020-09-01 上传
2022-07-14 上传

车载诊断技术
- 粉丝: 6532
- 资源: 693
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
