大型越野机器人BigDog的设计与控制
需积分: 9 111 浏览量
更新于2024-07-25
收藏 1.95MB PDF 举报
BigDog The Rough-Terrain Robot
BigDog是一种具有自适应控制和柔性动作的rough-terrain机器人,能够在崎岖不平的环境中行走和运行。下面是BigDog的结构和控制算法相关知识点:
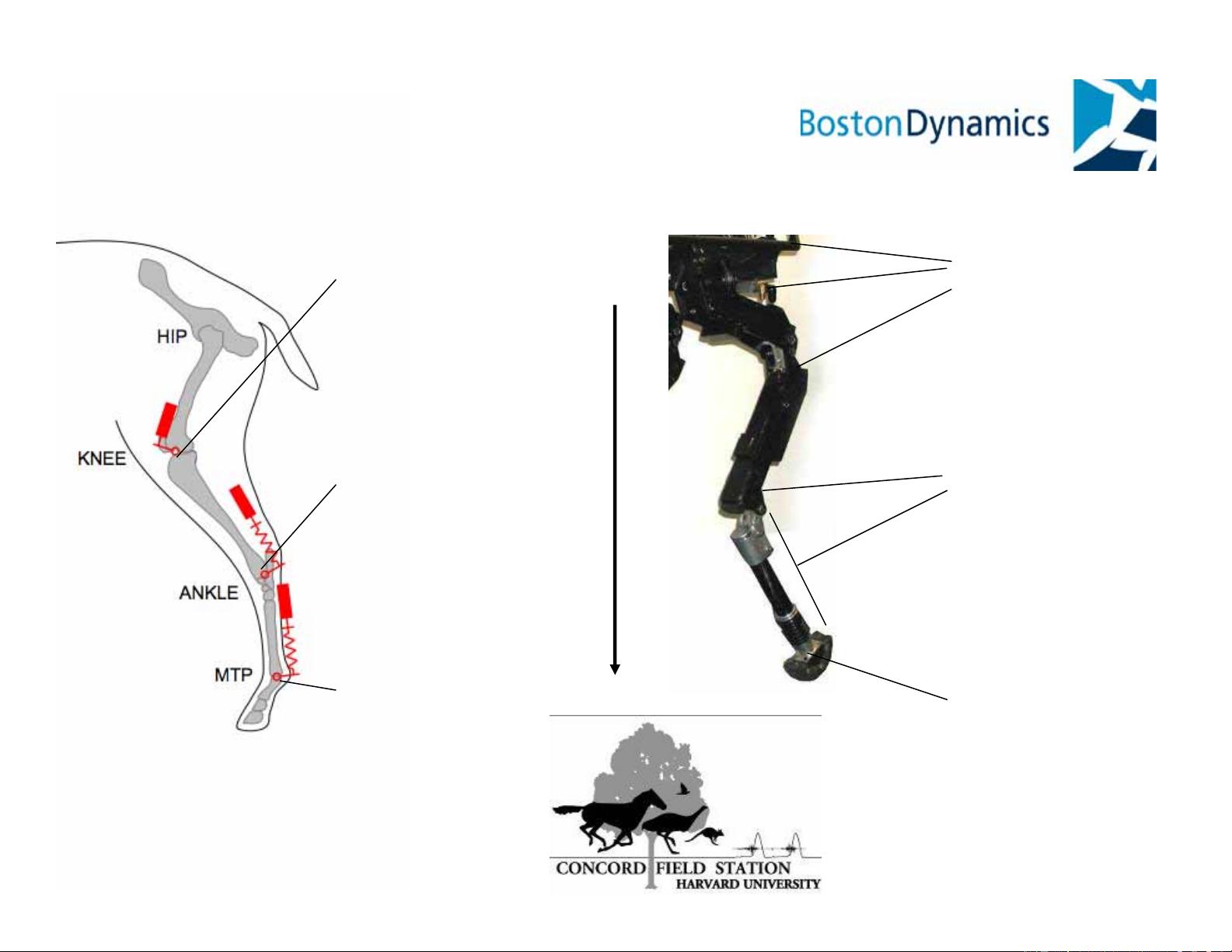
1. **机器人结构**:BigDog机器人由多个部分组成,包括腿部、髋部、膝部、踝部和足部,每个部分都具有特殊的功能和结构。腿部和髋部使用了螺旋弹簧和力感测器来检测和控制机器人的运动。
2. **控制算法**:BigDog机器人的控制算法基于腿部和髋部的运动模式,使用了多种感知器和执行器来实现机器人的运动控制。控制算法包括了平衡控制、姿态控制和步态规划等方面。
3. **感知器**:BigDog机器人使用了多种感知器来感知环境和机器人的状态,包括了激光雷达(LIDAR)、GPS、陀螺仪(Gyro)、力感测器(Force Sensor)等。
4. **执行器**:BigDog机器人使用了多种执行器来实现机器人的运动,包括了电机、液压系统和齿轮箱等。
5. **计算机系统**:BigDog机器人的计算机系统基于PC104 stack和Pentium CPU,使用了QNX实时操作系统和C++编程语言,能够实时处理机器人的感知和控制信息。
6. **控制原则**:BigDog机器人的控制原则包括了保持身体姿态、控制步态和保持平衡等方面,使用了多种控制算法和感知器来实现机器人的运动控制。
7. **应用场景**:BigDog机器人能够应用于崎岖不平的环境中,例如山地、森林和灾区等,能够用于搜索、救援和探测等任务。
8. **关键技术**:BigDog机器人的关键技术包括了自适应控制、柔性动作、感知融合和实时控制等方面,这些技术使得机器人能够在崎岖不平的环境中行走和运行。
9. **发展前景**:BigDog机器人的发展前景广阔,能够应用于多种领域,例如灾区救援、环境监测和军事作战等。
BigDog机器人是一种具有自适应控制和柔性动作的rough-terrain机器人,能够在崎岖不平的环境中行走和运行,具有广阔的发展前景和应用前景。
Actuation
Compliance
+
Actuation
Compliance
+
Dissipation
More compliance
Less actuation
Actuator
Compliance
+
Actuator
Dissipation
Leg Comparison
剩余29页未读,继续阅读
2011-11-18 上传
2021-02-07 上传
2011-11-22 上传
2023-07-31 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

hitwj
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
