MATLAB模拟四连杆机构运动分析
DOCX格式 | 159KB |
更新于2024-08-03
| 98 浏览量 | 举报
"该文档是关于使用Matlab进行四连杆机构运动模拟的教程,包含代码示例。四连杆机构常用于各种机械设备中,利用不同的机构类型(曲柄摇杆、双曲柄、双摇杆)实现特定的运动转换。文档首先介绍了四连杆的基本概念,包括分类和格拉霍夫定理,然后可能进一步探讨如何在Matlab中建立四连杆模型和进行动态仿真。"
在机械工程领域,四连杆机构是一种重要的运动转换装置,由四个杆件通过转动副相互连接组成。在Matlab中,可以通过建立数学模型和利用其强大的计算能力来分析和模拟这类机构的运动特性。以下是四连杆机构及Matlab模拟的关键知识点:
1. **四连杆分类**:四连杆机构主要分为曲柄摇杆机构、双曲柄机构和双摇杆机构。曲柄摇杆机构有一根曲柄和一根摇杆,双曲柄机构则有两根曲柄,双摇杆机构的两个连架杆都是摇杆。不同类型的四连杆机构在实际应用中有着不同的功能和运动特点。
2. **格拉霍夫定理**:这是判断四连杆机构类型的重要依据,它规定了机构中是否存在整转副(即能够做整圆周转动的转动副)。当最短杆和最长杆的长度之和小于或等于其他两杆长度之和时,机构可能有多种类型,具体取决于选择哪个构件作为机架。若不满足此条件,机构将始终为双摇杆机构。
3. **Matlab模拟**:在Matlab中,可以通过建立杆件的几何关系和运动方程来模拟四连杆机构的运动。这通常涉及使用Simulink或定制的M文件来定义机构的自由度、约束条件以及输入输出关系。通过动态仿真,可以观察各连杆的位置、速度、加速度等参数,帮助工程师理解和优化机构设计。
4. **建模步骤**:首先,确定四连杆机构的各个参数,如杆件长度、转动中心位置等。接着,使用Matlab的符号计算工具或数值计算工具(如ode45)来设置初始条件和边界条件。最后,运行仿真并绘制结果,可以是时间历程图或三维动画,以便直观展示机构的运动行为。
5. **代码实现**:在提供的文档中,可能包含具体的Matlab代码示例,用于创建四连杆模型,设置输入(如曲柄角速度),并进行运动仿真。这些代码可以帮助初学者理解如何在实际项目中应用Matlab进行机构分析。
通过理解和掌握这些知识点,工程师能够有效地设计、分析和优化四连杆机构,以适应各种工程应用的需求,例如汽车引擎、机器人关节或其他需要精确控制的机械系统。在Matlab中进行四连杆机构的模拟,不仅提高了设计效率,还能提供直观的运动可视化,极大地推动了现代机械设计的进步。
______________________________________________________________________________________________________________
精品资料
1.Lmax+Lmin>其余两杆之和,------此铰链四杆机构为双摇
杆机构; 2.Lmax+Lmin≤其余两杆之和,要具体分析:
(1)Lmin 为机架------为双曲柄机构
(2)Lmin 为连架杆------为曲柄摇杆机构(Lmin 为曲柄)
(3)Lmin 为连杆------为双摇杆机构
1.3、理论分析
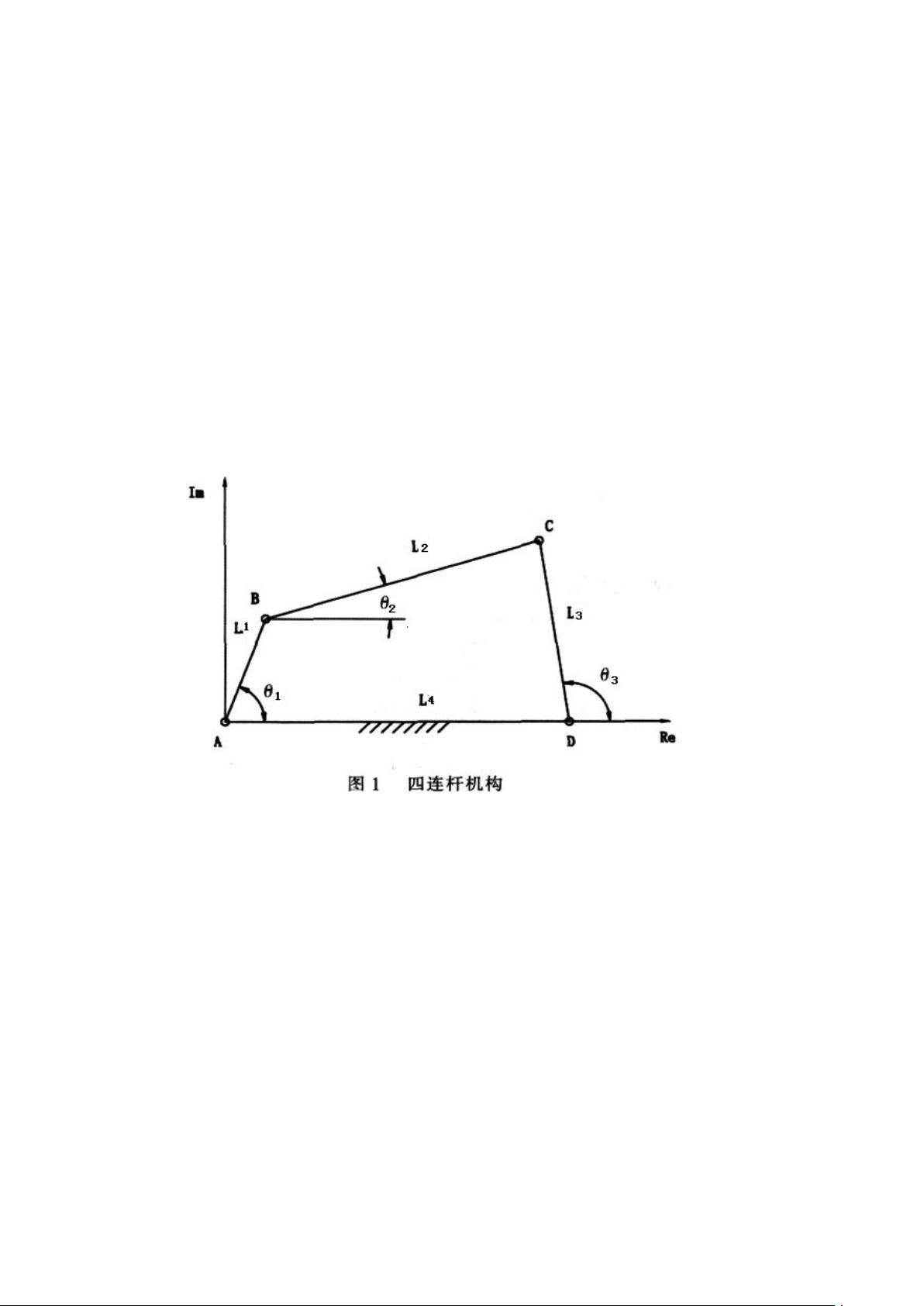
对图 1 的四连杆机构列出方程组。
其中 L1、L2、L3、L4 为四根杆,L4 为机架。
L1
×
cos
θ
1
+
L2
×
cos
θ
2
=
L3
×
cos
θ
1
+
L4
L1
×
sin
θ
1
+
L2
×
sin
θ
2
=
L3
sin
θ
3
由此两个方程消去
θ
2
,便可得到一个关于
θ
1
、
θ
3
的函数
F(
θ
1
,
θ
3
)
=
(
L3
×
cos
θ
3
+
L4
―
L1
×
cos
θ
1
)
2
+
(
L3
×
sin
θ
3
―
L1
×
sin
θ
1
)
2
―
L2
2
然后用隐函数求出
剩余13页未读,继续阅读
相关推荐



黑色的迷迭香
- 粉丝: 808
 我的内容管理
展开
我的内容管理
展开







最新资源
- DES加密解密工具:安卓平台上轻松实现数据保护
- toqito:量子信息理论研究的Python工具包
- 最新FFmpeg工具包:视频处理与播放的终极解决方案
- 「hello-world2」新测试分支的功能验证
- 提高CRFID传输速率的EPC协议创新方法研究
- 实现ViewPager无限循环的两种简便方式
- 下载Atom编辑器官方Windows汉化版,轻松编写CSS/HTML/JavaScript代码
- 新手友好:Notepad++成为C++学习首选工具
- C#初学者如何用窗体代码计算圆周率
- 基于.NET Core的CRUD模板快速开发解决方案
- JunkratCouncil官方网站,专注CSS设计的展示平台
- 高效实现导航小姐姐说话动作的3D模型动画教程
- 打造个性化牛津电子词典:完整A-Z分类的TXT词库
- XshellXftpPortable:免安装版提供一体化管理体验
- 易语言实现获取文件目录大小的脚本教程
- 开源正常运行时间监控器与状态页面:B Bentley Herron的实现
