改进型PID控制器在磁悬浮轴承系统中的应用研究
需积分: 50 50 浏览量
更新于2024-08-12
1
收藏 117KB PDF 举报
主动磁悬浮轴承控制系统设计
主动磁悬浮轴承(Active Magnetic Bearing,AMB)是一种先进的无接触式轴承技术,它利用电磁力使轴悬浮在空中,无需物理接触,因此具有无摩擦、高速运行、无需润滑和密封、寿命长等显著优点。这种技术在航空航天、半导体制造、核能、化工等行业中有广泛应用。
在主动磁悬浮轴承系统中,主要组成部分包括电磁铁、转子、位置传感器、控制器、模拟/数字(A/D)转换器、数字/模拟(D/A)转换器以及功率放大器。转子有六个自由度,其中旋转自由度由电机定子磁场控制,其他五个自由度则由磁轴承独立控制。通常,研究和分析会聚焦在一个自由度的磁悬浮系统上,以便简化问题。
主动磁悬浮轴承的控制原理基于反馈控制系统。当转子轴心偏离理想位置时,位置传感器会检测到这个偏差,并将信号传送给控制器。控制器根据偏差信号与参考信号对比,调整电磁铁产生的磁场力,以纠正转子的位置。这一过程需要快速且精确,以确保系统的稳定性。
传统的磁悬浮轴承控制常采用PD或PID控制器。PD控制器结合了比例(P)和微分(D)控制,可以快速响应偏差变化,但对扰动的抑制能力较弱,可能会导致较大的超调。PID控制器增加了积分(I)环节,可以消除稳态误差,但可能会增加系统的振荡。
针对PID控制器的不足,文章提出了改进型的PID控制器。这种改进旨在增强控制器的动态性能,减少超调,提高系统的抗干扰能力。通过对单自由度主动磁悬浮轴承系统进行数学建模和计算机仿真,结果表明改进型PID控制器相比常规PID控制器在动态性能上表现更优。
为了实现这种改进,可能涉及到对PID参数的优化调整,或者引入更复杂的控制策略,如自适应控制、滑模控制等。这些方法可以使控制器根据系统状态实时调整,以适应系统的非线性和不确定性。
主动磁悬浮轴承控制系统的设计是一项复杂而重要的任务,需要深入理解系统动态行为,精心设计控制器,以确保轴承在各种工况下都能稳定工作。而持续的研究和创新,如改进PID控制器,对于提升磁悬浮轴承系统的性能至关重要。
第 25卷 第 6期
2004年 12月
河 南 科 技 大 学 学 报 (自 然 科 学 版 )
Journal of Herm University of Science and Technology(Natural Science)
V01.25 No.6
Dec. 2Oo4
文章编号 :1672—6871(2004)06—0020—04
主动磁 悬浮轴 承控 制 系统设计
李 杰 ,刘 文 胜
(河南 科 技大 学 电子 信息 工 程学 院 ,河南 洛 阳 471003)
摘 要 :介 绍 了 主动磁 悬 浮轴 承 系统 的组 成 和基 本原 理 。在建 立 单 自由度 主动 磁悬 浮轴 承 系统 数学 模 型的基 础
上 ,分 析 了 目前 应 用 的 PID控 制器 的不足 ,并提 出 了一种 改 进型 PID控 制器 。仿 真结果 表 明 ,这 种 控 制 器 比 目
前应 用 的 PID控制 器有 更 优 良的动 态性 能 。
关键 词 :磁 悬 浮轴 承 ;PID控 制 器 ;计算 机 化仿 真
中图分 类号 :TP273 文献 标识 码 :A
0 前 言
主动磁 悬浮轴承 AMB(Active Magnetic Beating)是一复杂 的机 电耦合 系统 ,是通过定 子线圈产生 磁场
力使轴悬 浮起来且轴 心线位置 由控制 系统控制 的机 电一 体化新型轴承 。由于其具有无摩 擦 、转 速高 、不
需要 润滑和密封 、无环境 污染 、寿命 长等优点 ,而被广泛应 用 于航 天 、半导 体工业 、核 工业 、化工 等领 域。
高速 AMB系统是多变量 、强耦 合和非线性 的系统 ,所 以对其 控制 器设 计要求很 高 。传 统磁 悬浮 轴承 系
统解耦 后 的单 自由 度 控 制 采 用 PD或 PID控 制 器[1.2],但 存 在 对 扰 动 特 别 敏 感 和 超 调 量 较 大 的缺
点 3_6l。本文在建立 主动磁悬浮轴承径 向单 自由度数 学模 型 的基 础上 ,针对 目前 应用 的 PID控 制器 的
不足 ,给出一 种 改进 型 的 PID控制 器 ,并对这 种 PID控制下 的单 自由度磁 悬浮 轴承 系统进 行 了仿 真 分
析 。
1 磁 悬 浮 轴 承 系统 的 组成 及 工 作 原理
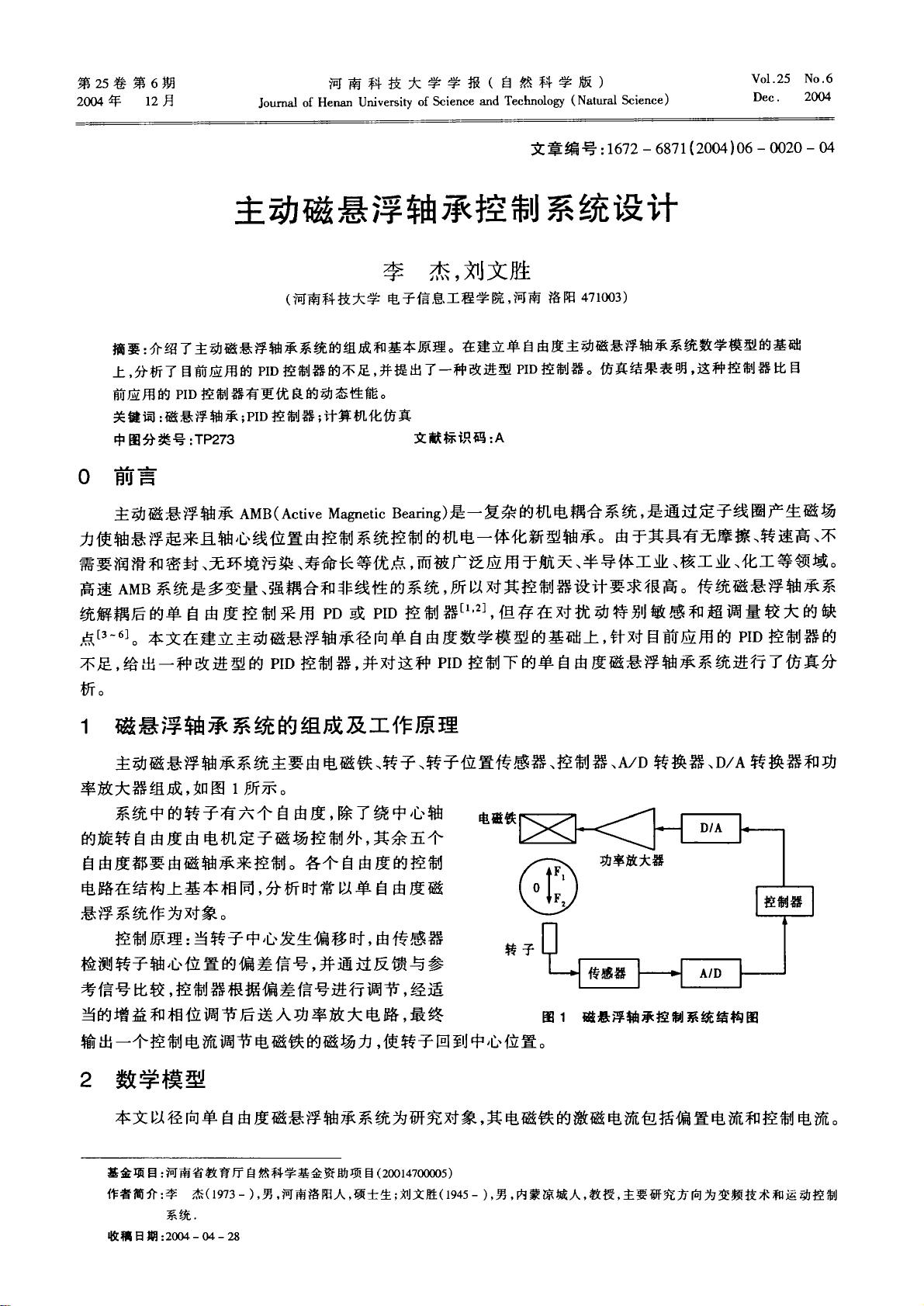
主动磁悬 浮轴承 系统 主要 由电磁铁 、转子 、转子位置传 感器 、控制 器 、A/D转换 器 、D/A转换 器和 功
率放大器组成 ,如图 1所 示 。
系统 中的转 子有 六 个 自由度 ,除 了绕 中心 轴 电磁铁
的旋转 自由度 由 电机 定 子磁 场控 制外 ,其余 五 个
自由度都要 由磁 轴承来 控制。各个 自由度 的控 制
电路在结构 上 基 本 相 同 ,分 析 时 常 以 单 自由度 磁
悬浮 系统 作 为 对 象 。
控制 原理 :当转子 中心发生偏 移时 ,由传感 器
检测转子 轴心位 置 的偏 差 信号 ,并 通过 反馈 与 参
考信号 比较 ,控 制器根据偏差 信号进 行 调节 ,经适
当的增 益 和相 位调 节 后送 入功 率放 大 电路 ,最 终 图1 磁悬浮轴承控制系统结构图
输 出 一个 控 制 电流 调 节 电磁 铁 的磁 场 力 ,使转子 回 到 中心 位 置 。
2 数 学模 型
本 文以径 向单 自由度磁悬浮轴 承系统为研究对 象 ,其 电磁铁 的激磁 电流包 括偏 置 电流和控 制电流。
基金 项 目 :河南 省教 育 厅 自然科学 基金 资助项 目(20014700005)
作者 简介 :李 杰 (1973一),男 ,河南 洛阳人 ,硕 士生 ;刘文 胜(1945一),男 ,内蒙 凉城 人 ,教授 ,主要 研 究 方 向为 变频 技 术 和运 动 控 制
系统 .
收 稿 日期 :2004—04—28
维普资讯 http://www.cqvip.com
下载后可阅读完整内容,剩余3页未读,立即下载
241 浏览量
2362 浏览量
270 浏览量
140 浏览量
2021-07-13 上传
2021-09-29 上传
2021-09-27 上传
146 浏览量

weixin_38569109
- 粉丝: 7
- 资源: 955
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实验6,c语言编程修改编译器源码,c语言
- 最漂亮的LED花朵,一朵永远盛开的机械郁金香-电路方案
- org.eclipse.jgit.pgm-3.2.0.0.2-UNOFFICIAL-ROBERTO-RELEASE.zip
- adminli
- 简单平衡车代码.zip
- furima-34554
- org.eclipse.jgit.pgm-3.2.0.0.2-UNOFFICIAL-ROBERTO-RELEASE.zip
- smartcat-serge-sync-plugin:Smartcat平台的持续本地化解决方案
- Adithya2008-C-29-pro-2
- 8.3 使用注册表-----
- 老外开发项目—STM32F429设计的mini示波器源代码共享-电路方案
- automatic_bicycle:自主自行车算法
- grib-rs:用于Rust的GRIB格式解析器
- ProjetoCalculadora:用JavaScript制作的简单计算器
- 基于HTML实现的儿童乐园蓝色可爱的小学网站模板5589(css+html+js+图样).zip
- sew 31c系列变频器说明 PPT.rar
