S7-1200通过FB284实现V90PN EPOS控制:详细教程与配置步骤
需积分: 50 12 浏览量
更新于2024-07-18
2
收藏 1.32MB PDF 举报
在本文档中,主要探讨了如何利用西门子S7-1200 PLC通过功能块FB284(SINA_POS)对V90 PN伺服驱动器进行EPOS(Enhanced Positioning System)控制。EPOS是一种高级定位控制技术,适用于需要高精度和响应速度的工业应用,如自动化生产线上的精密机械操作。
S7-1200与V90 PN之间的通信是通过PROFINET网络实现的,这是一种工业以太网标准,能够提供高速、可靠的数据传输。通过调用库中提供的FB284功能块,PLC能够发送和接收111报文,这是一种用于伺服驱动器控制的标准协议,包含了位置、速度和其他状态信息。
文档详细介绍了SINA_POS功能块的不同运行模式:
1. 绝对定位运行模式:在此模式下,PLC直接设定目标位置,驱动器会执行到指定位置。
2. 相对定位运行模式:基于当前的位置进行移动,适合于连续运动或跟随操作。
3. 连续运行模式(Setup mode):设备在没有停止信号时持续运行,可用于维持速度或压力。
4. 回零功能:使设备返回预设的零点位置。
5. 设置零点位置:允许用户定义参考点或起始位置。
6. 运行程序块:PLC通过控制指令控制驱动器的行为。
7. 点动和点动增量:提供临时精确移动,便于调试和调整。
8. 模式切换:根据ModePos值,PLC灵活切换不同的控制模式。
项目配置部分着重于硬件和软件的选择与配置。首先,需要确保S7-1200和V90 PN都支持PROFINET连接,并且正确安装了相关的驱动库。S7-1200项目的配置步骤包括创建新的项目、添加所需的硬件模块和配置FB284等。V90PN项目的配置则涉及设置控制参数、网络配置和安全选项。
这篇文档提供了S7-1200通过FB284控制V90 PN伺服驱动器的全面指南,涵盖了从原理、功能块使用到实际项目配置的全过程,对于在工业自动化领域中进行精确位置控制的工程师来说,是一份重要的参考资料。
Unrestricted
5
Copyright Siemens
AG Copyright year
All rights reserved
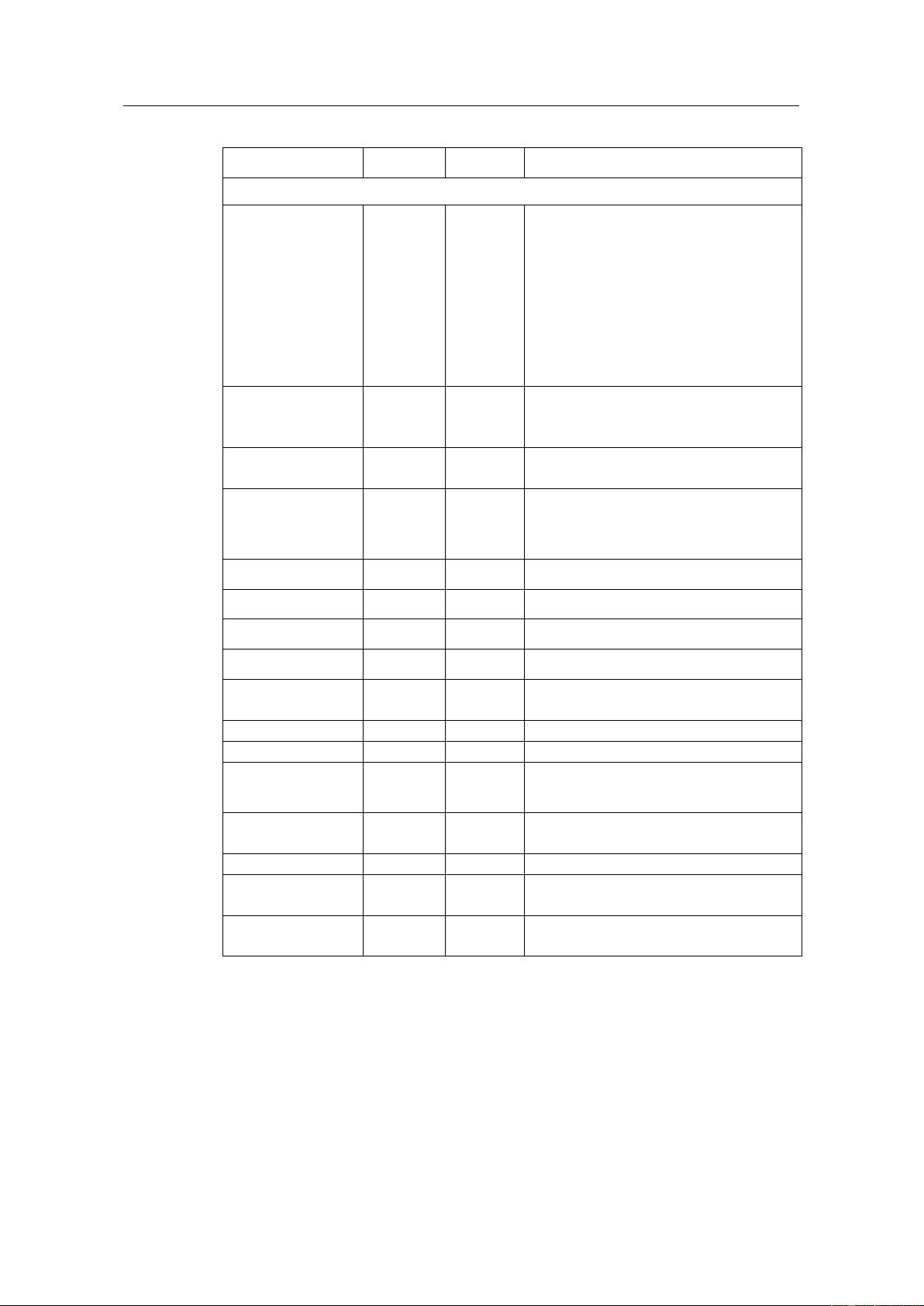
管脚
数据类型
默认值
描述
输入
ModePos
INT
0
运行模式:
1 = 相对定位
2 = 绝对定位
3 = 连续位置运行
4 = 回零操作
5 = 设置回零位置
6 = 运行位置块 0~16
7 = 点动 jog
8 = 点动增量
EnableAxis
BOOL
0
伺服运行命令:
0 = OFF1,
1 = ON
CancelTransing
BOOL
1
0 = 拒绝激活的运行任务
1 = 不拒绝
IntermediateStop
BOOL
1
中间停止:
0 = 中间停止运行任务
1 = 不停止
Positive
BOOL
0
正方向
Negative
BOOL
0
负方向
Jog1
BOOL
0
正向点动(信号源 1)
Jog2
BOOL
0
正向点动(信号源 2)
FlyRef
BOOL
0
0 = 不选择运行中回零
1 = 选择运行中回零
AckError
BOOL
0
故障复位
ExecuteMode
BOOL
0
激活定位工作或接收设定点
Position
DINT
0[LU]
对于运行模式,直接设定位置值 [LU]
/MDI 或运行的块号
Velocity
DINT
0
[LU/min]
MDI 运行模式时的速度设置[LU/min]
OverV
INT
100[%]
所有运行模式下的速度倍率 0-199%
OverAcc
INT
100[%]
直接设定值/MDI 模式下的加速度倍率
0-100%
OverDec
INT
100[%]
直接设定值/MDI 模式下的减速度倍率
0-100%
剩余21页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-04-13 上传
168 浏览量
2022-06-04 上传
2022-06-04 上传
2023-08-04 上传
2021-02-01 上传

weixin_40975847
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
