"FOC算法学习笔记:数学推导、SVPWM、PID控制及马鞍波生成"
需积分: 5 23 浏览量
更新于2024-01-27
3
收藏 7.34MB PDF 举报
在学习FOC过程中的一些笔记包括FOC几大变换的数学推导、SVPWM的过程、PID控制、积分抗饱和以及磁链圆限制等内容。FOC是一种用于交流电机控制的技术,其本质是通过精确测量电机状态并调整电机输入电压的方式来实现电机的高性能控制。FOC的核心思想是通过坐标变换将三相交流电机转换为两个独立的轴进行控制,即转子磁链轴和转子转速轴。
在FOC中,首先需要进行Clark变换,将三相交流信号转换为两相信号,并进行数学推导得到变换的数学表达式。Clark变换的目的是将三相变量转换为两相变量,以方便后续的计算和控制操作。在进行Clark变换时,需要计算等幅值变换系数和恒功率变换系数,这些系数的计算更加直接,可以通过一些简单的公式来得到。
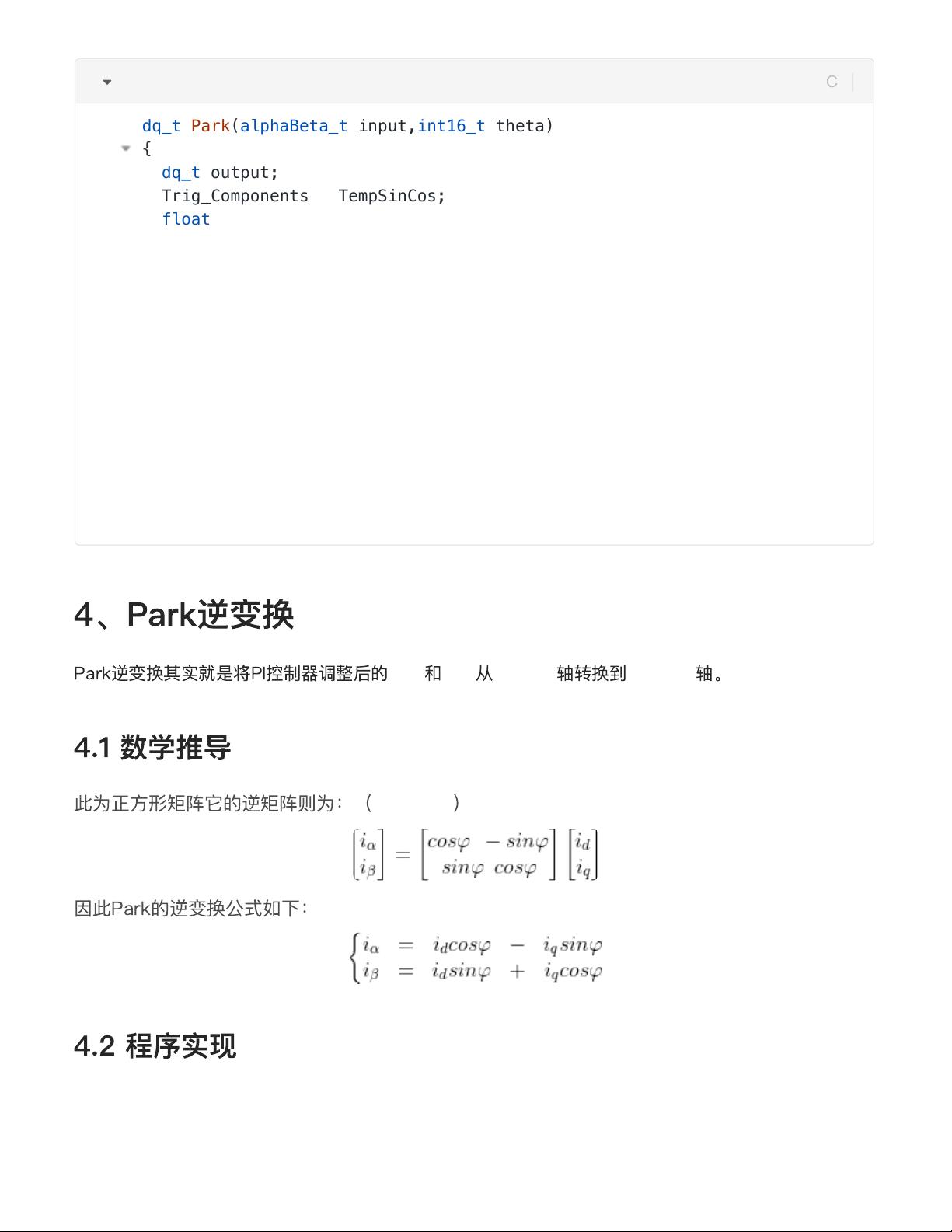
接下来是Park变换,Park变换的目的是将两相信号转换到转子坐标系,以便更好地理解和控制电机状态。同样,需要进行数学推导,并通过程序实现Park变换的计算。另外,还需要进行Park逆变换,将转子坐标系信号转换回两相信号,以便用于控制输入。
在FOC中,SVPWM技术是一种常用的控制方法,其原理是通过调整电机输入信号的占空比和频率来控制输出电压的大小和相位。需要对参考电压矢量进行扇区判断,并计算非零矢量和零矢量的作用时间,以确定输出电压。此外,还需要处理过调制,确定扇区矢量切换点的方法,并通过程序实现SVPWM算法。
PID控制是FOC中常用的控制方法之一,通过对电机状态进行反馈并调整控制输入来实现控制目标。需要进行离散化处理,实现位置式PID和增量式PID控制算法的区别,并通过程序实现PID控制器的功能。此外,还需要进行参数整定,并了解积分抗饱和的概念和方法,以避免积分饱和对控制系统的负面影响。
最后,磁链圆限制也是FOC中需要考虑的一个方面,通过确定MAX_MODULE值和START_INDEX值,并进行程序实现,实现磁链限制的控制策略。磁链圆限制的目的是保持电机的磁链在一定范围内,以保证电机的稳定性和性能。
总之,在学习FOC的过程中,需要理解FOC的核心思想和基本原理,并进行数学推导和程序实现。同时,还需要掌握一些常用的控制技术,如SVPWM和PID控制,并针对具体应用进行参数调整和优化。通过不断的学习和实践,可以实现对FOC控制算法的深入理解和应用。参考链接: http://dengfoc.com/。
9
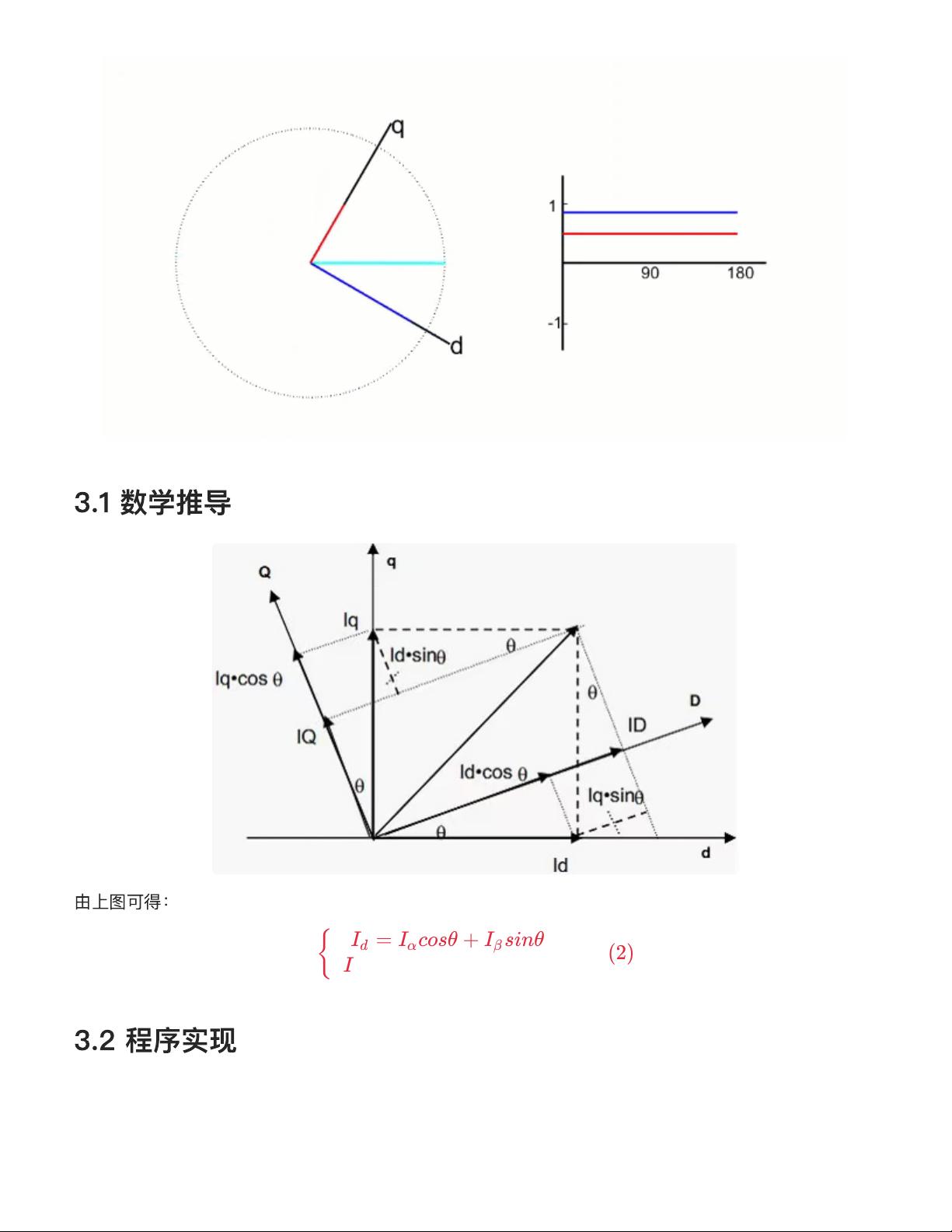
由
上
图
可
得
:
3.1
数
学
推
导
3.2
程
序
实
现
(2) {
I = I cosθ + I sinθ
d α β
I = −I sinθ + I cosθ
q α β
剩余48页未读,继续阅读
2022-05-28 上传
2021-07-06 上传
2022-07-15 上传
2022-07-15 上传
2023-07-14 上传

hlpinghcg
- 粉丝: 1w+
- 资源: 34
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
