数据结构复习精要:算法特性与时间复杂度分析
版权申诉
116 浏览量
更新于2024-07-08
收藏 830KB PDF 举报
"这份资料是针对数据结构课程的期末复习总结,内容详尽,涵盖了算法基本概念、数据结构核心要点以及具体的操作示例,如栈的运作和算法时间复杂度的分析。"
在数据结构的学习中,算法是基础且至关重要的部分。算法具有五个基本特征:至少有一个输入、至少有一个输出、有穷性(算法必须在有限步骤内结束)、确定性(给定相同输入,算法应得出相同输出)和可行性(算法能在有限时间内执行并完成)。在本复习资料中,算法被定义为对特定问题求解步骤的一种描述,表现为有限指令序列。算法分析的主要目标是对算法的效率进行分析,以便于优化,其主要关注两个方面——空间性能和时间性能。
时间复杂度是衡量算法效率的关键指标,它描述了算法运行时间与问题规模n的关系。大O记号用于表示时间复杂度的上限,例如,Ο(1)表示常数时间复杂度,意味着算法的执行时间不随n的变化而变化;Ο(nlog2n)则表示算法的执行时间与n的对数成正比。在计算时间复杂度时,我们通常忽略低次幂和最高次幂的系数。
数据结构是研究数据元素及其相互关系的学科。数据元素是数据的基本组成单元,而数据项是元素的最小单位。数据结构不仅包括元素本身,还包括元素间的关系。例如,给定的数据结构(D,R),其中D={1,2,3,4,5,6},R={(1,2),(2,3),(2,4),(3,4),(3,5),(3,6),(4,5),(4,6)},是一个图结构,其逻辑结构图描绘了元素间的连接关系。
栈是一种特殊的线性表,遵循后进先出(LIFO)的原则,即最后进入栈的元素最先离开。栈在实现递归函数调用中起到关键作用,因为递归的本质就是函数调用的栈操作。例如,元素54321依次入栈,出栈顺序将是1DCBA。同样,当元素ABCD入栈后,出栈顺序将是DCBA2345。
在实际操作栈的过程中,入栈和出栈是基本操作。入栈时,如果栈已满(达到最大容量Size-1),则会抛出“上溢”异常;而出栈时,如果栈为空(top等于-1),则会抛出“下溢”异常。这两个操作通常由编程语言提供的栈类实现,例如C++中的SeqStack类,包含Push()方法用于入栈,Pop()方法用于出栈。
这份资料全面地复习了数据结构和算法的核心知识点,包括它们的概念、特性、分析方法以及具体实例,对于理解和掌握数据结构的期末复习极具帮助。
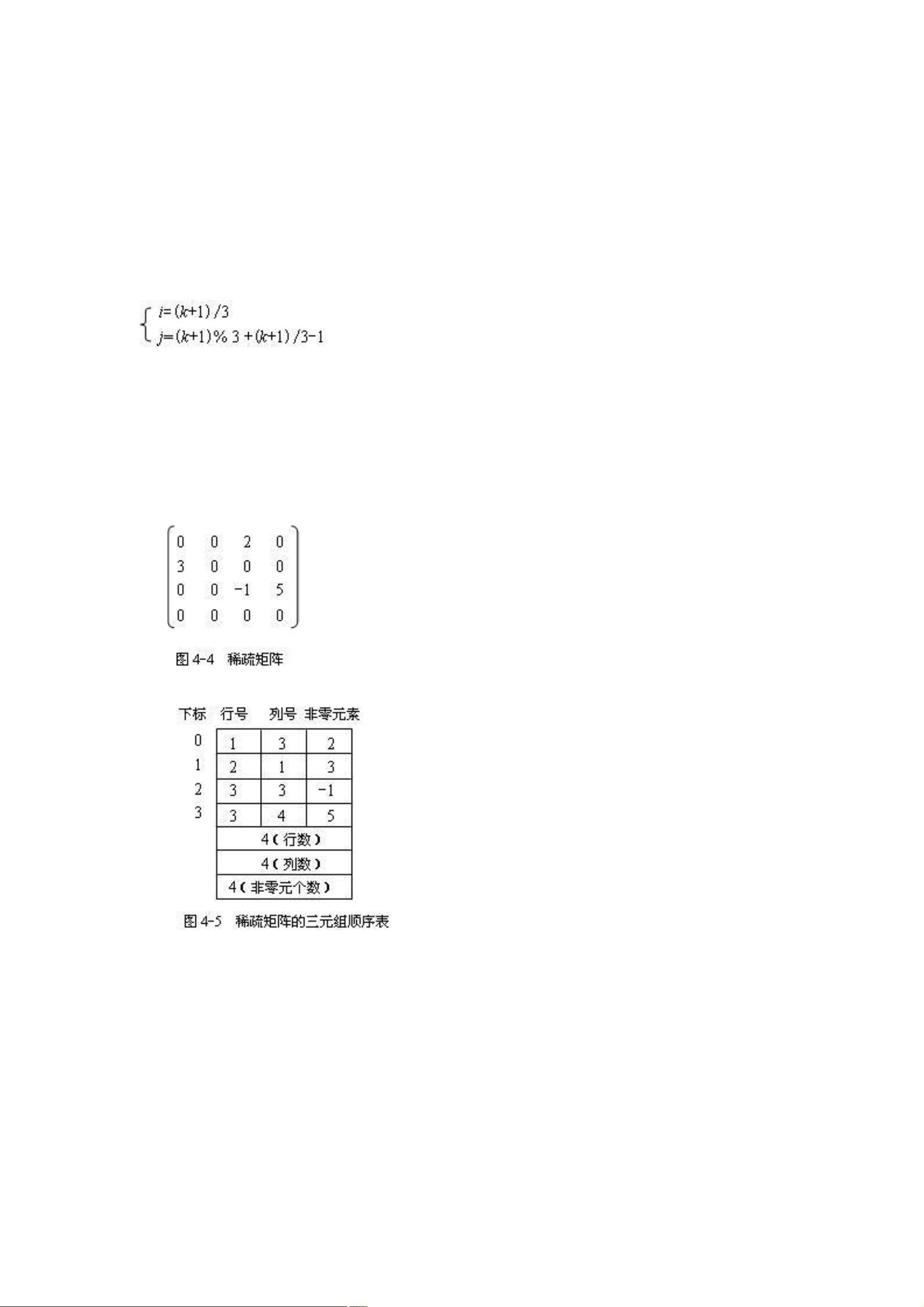
得 B[k]=aij 求:
⑴ 用 i, j 表示 k 的下标变换公式;
⑵ 用 k 表示 i, j 的下标变换公式。
【解答】⑴ 要求 i, j 表示 k 的下标变换公式,就是要求在 k 之前已经存储了多少个非零元素,这些非零元
素的个数就是 k 的值。元素 aij 求所在的行为 i,列为 j,则在其前面的非零元素的个数是;k=2 + 3(i-1)+( j
-i + 1)= 2i+ j。
⑵ 因为 k 和 i, j 之间是一一对应的关系,k+1 是当前非零元素的个数,整除即为其所在行号,取余表示当
前行中第几个非零元素,加上前面零元素所在列数就是当前列号,即
1 一个 n×n 的对称矩阵,按行优先或列优先进行压缩存储,则其存储容量为( n(n+1)/2 )
2 设 n 行 n 列的下三角矩阵 A(行列下标均从 1 开始)已压缩到一维数组 S[1]~S[n(n+1)/2]中,若按行优
先存储,则 A[i][j]在数组 S 中的存储位置是(i×(i-1)/2+j )。
一个稀疏矩阵如图 4-4 所示,写出对应的三元组顺序表和十字链表存储表示
对应的三元组顺序表如图 4-5 所示,十字链表如图 4-6 所示
剩余14页未读,继续阅读
2021-08-07 上传
2021-08-07 上传
2022-02-05 上传
2021-10-13 上传
2021-09-30 上传
2021-11-11 上传
2022-03-13 上传
2022-01-01 上传
2021-11-04 上传

qiulaoban
- 粉丝: 1
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- NotATokenLogger
- capture_react
- ac:YML放置区
- 学生成绩管理系统.rar
- 【Java毕业设计】Java 网上商城系统-毕业设计.zip
- 电子功用-按键识别方法、键盘和电子设备
- AT91SAM7X256开发板(工程文件+程序),可直接制板加工-电路方案
- kbd_check:键盘检查器
- python实例-13 截图工具.zip源码python项目实例源码打包下载
- DA_project-
- Bot-S-ries-SITE-TOP-FLIX:阿尔法玛意甲上的Bot para passar osepisódios现场,Top Flix,testei unicamente nasérie宣言。
- django_sso:Django框架实现OAuth2
- 【Java毕业设计】c++,毕业设计,因为网络专业不能写java。冥思苦想了这么个玩意儿,本来想借此机会学习http.zip
- 电子功用-可充电锂硫电池的正极活性物质及其制备方法
- PackCC:用于C的packrat解析器生成器-开源
- 卡片式插入列表(iPhone源代码)
