"多模态数据协同的高精度点云配准算法及其应用"
版权申诉
97 浏览量
更新于2024-02-19
收藏 1.89MB DOCX 举报
基于多模态数据协同的弱纹理表面高精度点云配准算法.docx是针对大型构件表面弱纹理特征的捕捉和多次测量的精度配准问题而提出的。该算法采用集成结构光与光度立体视觉的复合测量系统,利用结构光测量获取工件表面整体形状的点云数据,并利用光度立体视觉获取表面精细弱纹理的法向量信息。在此基础上,提出了一种融合邻域点云坐标与法向量信息的新型局部特征描述子,能够对弱纹理工件表面特征进行有效且鲁棒地描述。通过大量的仿真和真实实验验证,证明了所提出方法的有效性,性能大幅超越了基于传统特征描述子的迭代最近点算法。该方法能够有效捕捉并描述弱纹理表面的丰富细节特征,构建出鲁棒显著的特征描述子,从而大幅提升了测量结果的匹配精度,减小了大型复杂构件的整体重建误差。
在本研究中,为了解决大型构件表面弱纹理特征的捕捉和多次测量的精度配准问题,提出了一种基于多模态数据协同的点云配准算法。该算法采用了集成结构光与光度立体视觉的复合测量系统,利用结构光测量获取工件表面整体形状的点云数据,并利用光度立体视觉获取表面精细弱纹理的法向量信息。通过综合利用这两种不同的测量方式,我们能够更全面地获取构件表面的信息,从而提高了配准的精度和鲁棒性。
值得注意的是,为了更好地描述弱纹理表面的特征,我们还提出了一种融合邻域点云坐标与法向量信息的新型局部特征描述子。这一描述子能够有效地捕捉弱纹理表面的细节特征,并且具有很强的鲁棒性,能够更准确地描述表面的特征。通过大量的仿真和真实实验验证,我们证明了所提出方法的有效性,其性能和精度都大幅超越了基于传统特征描述子的配准算法。这意味着我们的算法能够更准确地捕捉和描述弱纹理表面的特征,从而提高了测量结果的匹配精度,减小了大型复杂构件的整体重建误差。
总的来说,基于多模态数据协同的弱纹理表面高精度点云配准算法在解决大型构件表面弱纹理特征的捕捉和多次测量的精度配准问题方面取得了显著的成果。该算法在实际应用中能够更准确地捕捉和描述表面的特征,提高了测量结果的匹配精度和整体重建的准确性,具有很大的应用前景。通过这一研究,我们对弱纹理表面的高精度点云配准问题有了更深入的理解,并提出了一种可行的解决方案,为相关领域的研究和实际应用提供了有力的支持。
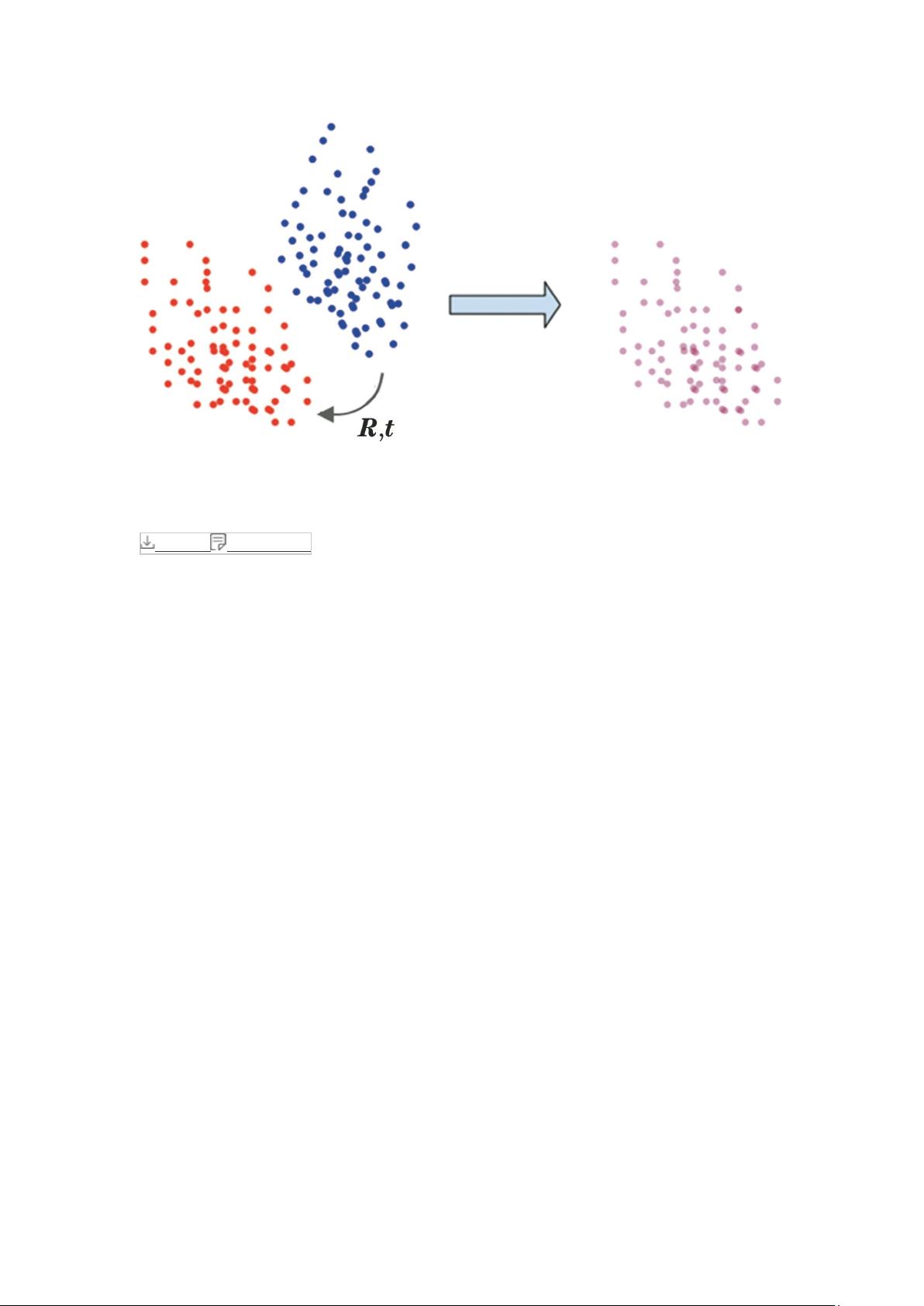
图 1. ICP 方法示意图
Fig. 1. Schematic diagram of ICP algorithm
下载图片 查看所有图片
ICP 算法的主要思路是通过不断迭代计算两片点云的刚体变换,利用最小二乘法得到最佳匹
配。假设两组位姿不同的点云分别为 P 和 Q,其中源点云 P={p
i
|p
i
∈ℝ,i=1,2,…,n},目标点云
Q={q
i
|q
i
∈ℝ,i=1,2,…,n},然后建立目标函数
f(R,t)=∑i=1n∥Rpi+t−qi∥22,(1)f(R,t)=∑i=1n‖Rpi+t-qi‖22,(1)
式中:R 为刚体变换的旋转部分;t 为刚体变换的平移部分;n 为点云中点的数量。
(1)式只针对两组仅有位姿不同但数量相同的点云数据,而实际上,对于不同大小的点云,需要
寻找两组点云的对应点集,再进行优化。基于目标函数(1)式可以得到刚体矩阵的迭代收敛
解,具体求解过程如下。
1) 基于点云对之间的距离寻找对应点。对于源点集中每个点 p
i
,搜索其在目标点集 Q 上的
欧氏距离最近的点 q
i
,并将其作为对应点,依次完成所有点的匹配。
2) 基于质心寻找最优平移向量, 即令 ∂f∂t∂f∂t=0,则
t=1n∑i=1nqi−R⋅1n∑i=1npi=q−−Rp−,(2)t=1n∑i=1nqi-R·1n∑i=1npi=q--Rp-,(2)
式中: q−q-为目标点云的质心; p−p-为源点云的质心。
3) 通过奇异值分解(SVD)计算最优旋转矩阵 R
*
,目标函数为
f(R)=∑i=1n∥∥R(pi−p−)−(qi−q−)∥∥22
。
(3)f(R)=∑i=1n‖R(pi-p-)-(qi-q-)‖22。(3)
4) 计算转换后源点云到目标点云的距离, 若大于设置阈值 τ,则利用优化后的变换矩阵返回
步骤 1)。
下载后可阅读完整内容,剩余18页未读,立即下载
相关推荐





罗伯特之技术屋
- 粉丝: 4609
 我的内容管理
展开
我的内容管理
展开







最新资源
- EclipseEE平台下Struts1 Web程序的入门调试指南
- 复古n-gon渲染器:HTML5画布上的软件3D艺术
- Java专业课程源代码压缩包文件名详解
- 简易文档管理系统源码:适用于小型企业高效管理
- Flacfish语言学习资源:FLA3D命令集锦解读
- 电子时钟设计原理与单片机应用毕业论文研究
- MyBatisCodeHelperPro 2.8.2 功能升级与优化
- 实现struts2+spring3+mybatis3集成登录功能
- 家庭理财管理系统:SQL与VB的高效信息管理
- 深入探索Windows PowerShell系列课程:技巧、应用与实战
- Android平台的AutoTextView自动化文本显示控件开发指南
- SSM框架下的日志系统开发实践
- 郑庆华JSP课程设计:固定资产管理系统实现
- Ansys中文高级分析技术指南
- 开源RISC处理器OR1200 Verilog源码发布
- Java程序员的LeetCode游戏代码实战
