
基于基于CAN数据的安全驾驶评价的建模与分析数据的安全驾驶评价的建模与分析
研究中自主搭建车辆CAN数据采集平台,提出以行车安全性为主,辅以乘车舒适度和机动车油耗量共3个指标评
价驾驶人的综合素质,其很大程度上反应了驾驶安全,涉及到方向盘转角熵值、方向盘转角速率 、机动车速度
熵值等7个因素。模型中先用层次分析法建立单因素权重向量,然后建立隶属度函数确定单因素模糊判断矩阵,
最后结合最大隶属度原则对模型求解评定驾驶人的综合素质。实践表明,此模型为驾驶安全的评价提供了一个
简单有效的数据分析方法。
0 引言引言
在过去几十年,道路交通事故每年造成近130万人死亡、5 000万人伤残
[1]
,约85%的交通事故与人为因素有关,研究驾驶
员行为有助于改善道路交通安全。
传统的交通检测系统主要采用雷达、超声波、红外线、声频及视频图像等技术,设备成本过高。驾驶行为研究基础实验室
即驾驶模拟器,可以采集多样化的数据,但数据真实性欠佳
[2]
。
研究驾驶人行为需要多类信息的融合,对于不同的信息可以提出不同的评价指标,如方向盘转角标准差、加速度变化反映
驾驶人对车辆的控制力,加速度反映汽车的油耗,方向盘转角熵、眼动等情况反映驾驶人的疲劳、酒驾状态
[3-6]
。评价安全驾
驶的模型是一个复杂的系统,国内外很多学者专家成功地将模糊逻辑理论运用到了驾驶人行为分析的模型中。1965年,扎德
(L A Zadeh)教授首次提出了基于模糊集合论(Fuzzy Sets)的模糊逻辑
[7]
。Ryan A. McGee等人基于驾驶人习惯构造模糊
隶属度函数,建立自适应模糊逻辑系统,能够准确地预测驾驶人使用巡航系统的偏好程
[8]
。Won M等人把模糊推理系统集成
到一个交通阻塞控制算法中,有效地减少了交通阻塞
[9]
。咸化彩用模糊网络分析法建立了次任务安全驾驶等级评判模型,并用
实验数据验证了模型的有效性
[10]
。
研究中自主搭建车辆CAN数据采集平台,以乘车安全性为主,乘车舒适度和机动车油耗量为辅3个指标评价驾驶员的综合素
质,实测数据证明了此模型评判安全驾驶的有效性。
1 确定安全驾驶评价的参数确定安全驾驶评价的参数
1.1 数据的采集数据的采集
CAN(Control Area Network)是一种总线式拓扑结构的通信协议,主要用来控制车量内部各ECU之间通信的有序进行。
研究中,以CAN总线协议为基础,使用数据采集模块Openxc-vi(OpenXC vehicle interface)取代多种悬挂式传感器,在微软
的Surface 4电脑上Windos10系统下搭载汽车测试平台。平台中,Openxc-vi与汽车诊断口OBD(On-Board Diagnostic)连
接,PC端与Openxc-vi用蓝牙无线连接,采集信息时,PC端通过串口读取Openxc-vi采集到的协议帧并解析获取所需要的信息
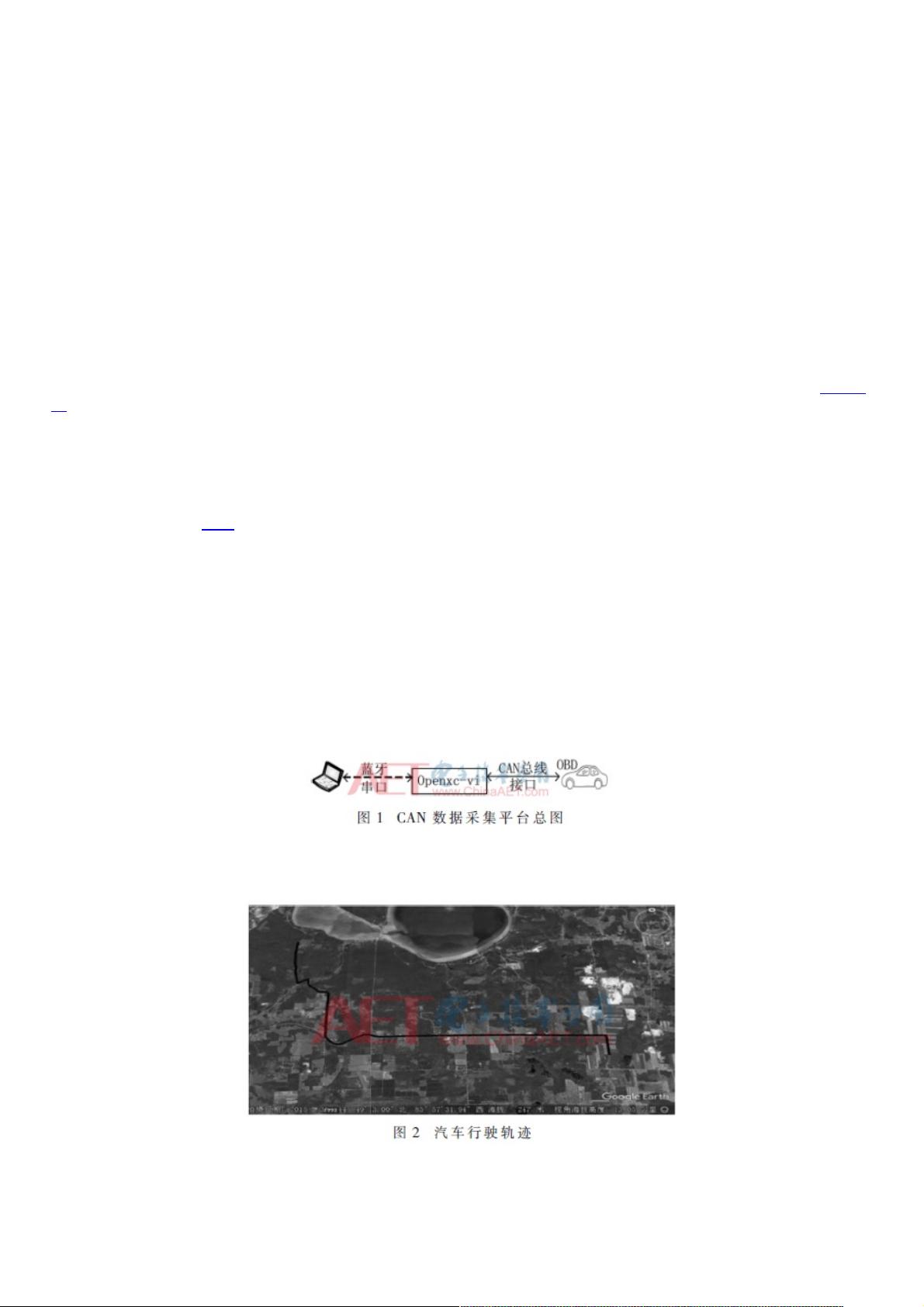
数据存储到本地,包括:方向盘转角、经纬度、发动机速度、车速等20余项数据。CAN数据采集平台示意图如图1。
从实测CAN数据中提取GPS经纬度,汽车方向盘转角,车速绘制如图2、图3所示,显然图2谷歌地图上汽车的行驶轨迹与
图3汽车方向盘转角和速度变化匹配完美。
下载后可阅读完整内容,剩余6页未读,立即下载

weixin_38536267
- 粉丝: 2
- 资源: 942
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


