Q-Learning算法在路径学习中的缺陷与优化
 已收录资源合集
已收录资源合集
需积分: 0 41 浏览量
更新于2024-07-01
收藏 729KB PDF 举报
在本篇笔记中,作者深入探讨了Agent智能体算法中的Q-Learning算法在路径自主学习过程中的应用和挑战。Q-Learning作为一种强化学习的基础算法,其核心在于通过学习每个状态下采取不同动作的价值,以最大化长期回报。然而,算法存在一个关键缺陷,即“过高估计”问题,即在估计状态-动作对的价值时,可能会过分偏向于已经被采样过的状态和动作,而对未采样过的则可能低估。
作者使用Python编程语言,特别是TensorFlow和NumPy库,来实现Q-Learning的模拟,包括构建三维迷宫环境,以观察算法在实际路径规划中的表现。在模拟中,他们发现算法在处理动态变化的环境时,由于采样偏差导致的策略波动较为明显。为了解决这个问题,他们引入了ε-greedy策略,起初随机性较强,随着训练的进行逐渐降低,确保了在探索和利用策略之间的平衡。
Q-Learning算法基于最优价值思想,依赖于交互序列中的信息来更新价值模型,这与价值迭代法有着相似之处。随着深度学习的发展,Q-Learning在某些领域取得了专家级的性能,但同时也暴露了其局限性,尤其是在环境复杂或部分信息不透明的情况下。
本研究的目标是通过调整参数,优化Q-Learning在特定场景下的表现,解决智能体如何在不能完全感知环境状态时做出有效决策的问题。作者关注的是智能体如何从环境变化中学习,并通过调整算法参数,使环境与动作选择之间的映射更加精确,以实现最佳的环境-动作迁移。
此外,作者还提到了SARSA算法与Q-Learning算法的区别,虽然两者都是基于Q表的算法,但在细节上可能存在不同的学习和更新策略。通过比较和分析,可以进一步提升算法的性能和稳定性。这篇笔记深入剖析了Q-Learning算法的内在机制,挑战,以及在路径自主学习中的应用优化策略,为相关领域的研究者提供了有价值的参考。
4
强化学习方法汇总
了解强化学习中常用到的几种方法
,
以及他们的区别
,
对我们根据特定问题选择方法时
很有帮助. 强化学习是一个大家族, 发展历史也不短, 具有很多种不同方法. 比如说比较
知名的控制方法 Q learning, Policy Gradients, 还有基于对环境的理解的 model-based RL
等等
.
接下来我们通过分类的方式来了解他们的区别
.
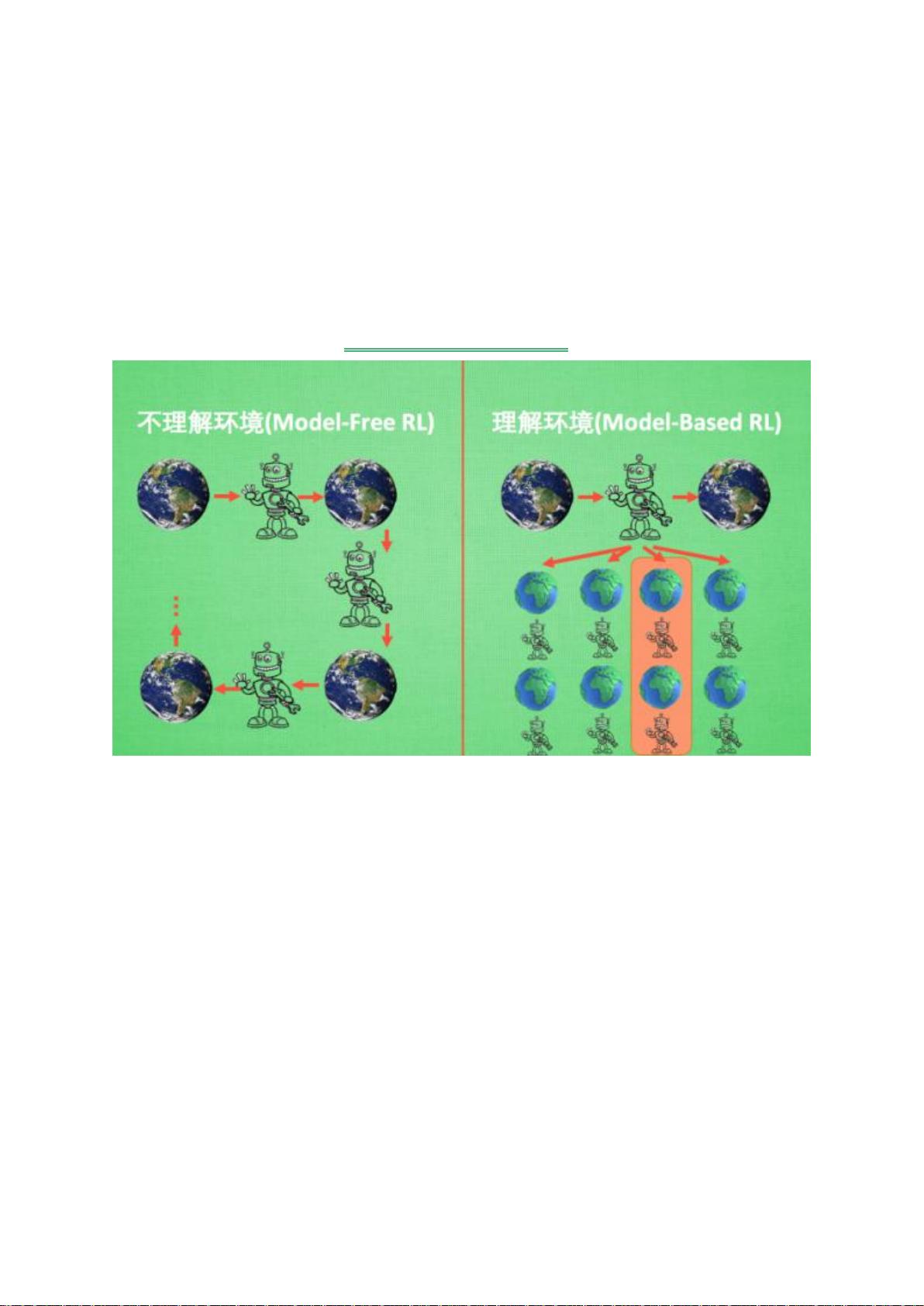
Model-free 和 Model-based ¶
我们可以将所有强化学习的方法分为理不理解所处环境
,
如果我们不尝试去理解环
境, 环境给了我们什么就是什么. 我们就把这种方法叫做 model-free, 这里的 model 就是
用模型来表示环境, 那理解了环境也就是学会了用一个模型来代表环境, 所以这种就是
model-based
方法
.
我们想象
.
现在环境就是我们的世界
,
我们的机器人正在这个世界里
玩耍, 他不理解这个世界是怎样构成的, 也不理解世界对于他的行为会怎么样反馈. 举
个例子, 他决定丢颗原子弹去真实的世界, 结果把自己给炸死了, 所有结果都是那么现
实
.
不过如果采取的是
model-based RL,
机器人会通过过往的经验
,
先理解真实世界是
怎样的, 并建立一个模型来模拟现实世界的反馈, 最后他不仅可以在现实世界中玩耍,
剩余17页未读,继续阅读
2023-11-07 上传
2021-05-24 上传
2021-03-22 上传
2015-07-16 上传
2021-04-26 上传
2021-03-14 上传









