Fanuc机器人Devicenet配置详解:主站与适配器连接步骤
版权申诉
159 浏览量
更新于2024-08-06
收藏 263KB PDF 举报
本文档详细介绍了Fanuc机器人使用Devicenet进行连接配置的过程,Devicenet是一种实时工业通信网络标准,适用于自动化和控制系统的设备间通信。在Fanuc机器人应用中,机器人通常扮演主站角色,而万可现场总线适配器则作为远程终端。
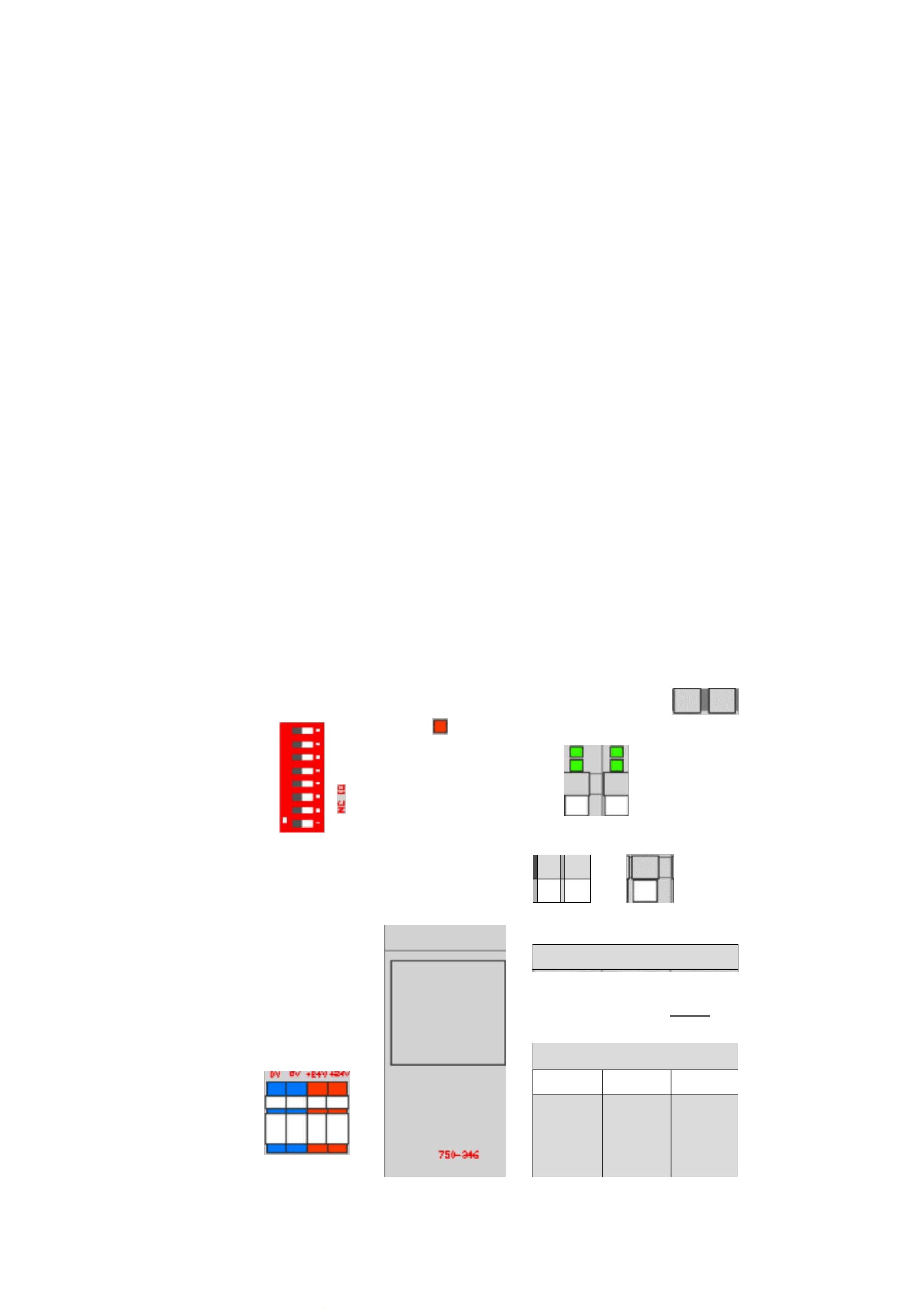
首先,硬件配置主要包括一个全槽主板(SST-DN3-104 daughterboard),以及万可的Devicenet现场适配器(如750—346型号),数字输入/输出模组(例如750—402和750—531),以及终端模块(750—600),以及24伏开关电源。这些组件确保了网络的物理连接和供电需求。
在软件方面,需要在机器人上安装Devicenet接口,虽然主站(机器人)一般不需要额外的软件,但确保接口子板的正确配置至关重要。设置步骤包括进入菜单、选择I/O选项,然后选择DeviceNet。在子板上,通过PID拨码开关设定板卡编号,同时在软件中配置MCID(主站设备标识符)和波特率,这里提到的波特率有125kbps、250kbps和500kbps可供选择。
机器人TP(Tool Pendant)设置涉及两个主要部分:一是配置和连接Devicenet接口子板,需要将子板状态设置为离线(OFFLINE),然后详细配置子板参数,如MAC-ID、波特率、扫描类型等。二是子板的自动重启、输入恢复状态、操作状态和错误严重性等级等设置。
值得注意的是,现场总线适配器的连接方式与机器人接口保持一致,其中涉及到CAN信号线的颜色对应,例如CAN_H、CAN_L和DRAIN线,这些线缆在连接过程中需要正确插接。
这篇文档提供了Fanuc机器人使用Devicenet进行连接的详尽指导,包括硬件选择、软件配置和实际连接步骤,这对于理解和实施Devicenet网络在工业机器人的集成至关重要。对于维护工程师或系统集成者来说,这是一个实用的参考资源。
Device net
连接
简介:机器人做主站
万可现场总线适配器做远程终端
1,
硬件:
A full-slot motherboard
SST-DN3-104 daughterboard
万可 device net 现场适配器 750— 346,
数字输入模组 750— 402,数字输出模组 750 — 531
终端模块 750— 600。24 伏开关电源。
device net slave(做
2,
软件:机器人安装 device net in terface,
主站可以不要
)
软件。
3,
现场总线接法:
尬
号
L
口
皿
■
□
DO QQ OO
-*21V
ULU 3L I 1
o 9
o3
I
□
ocmcnoo
1 II | ||
n
| ||
II | || | ||
OO OO
OO
75ir
e
下载后可阅读完整内容,剩余5页未读,立即下载
2023-06-09 上传
2021-07-04 上传
2021-04-26 上传
2021-11-27 上传
2022-07-10 上传
2023-03-29 上传
2022-03-17 上传
2022-06-15 上传
2022-07-03 上传

竖子敢尔
- 粉丝: 1w+
- 资源: 2470
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
