"两轮平衡车机器人设计与实现"
版权申诉
182 浏览量
更新于2024-02-25
收藏 8MB PPTX 举报
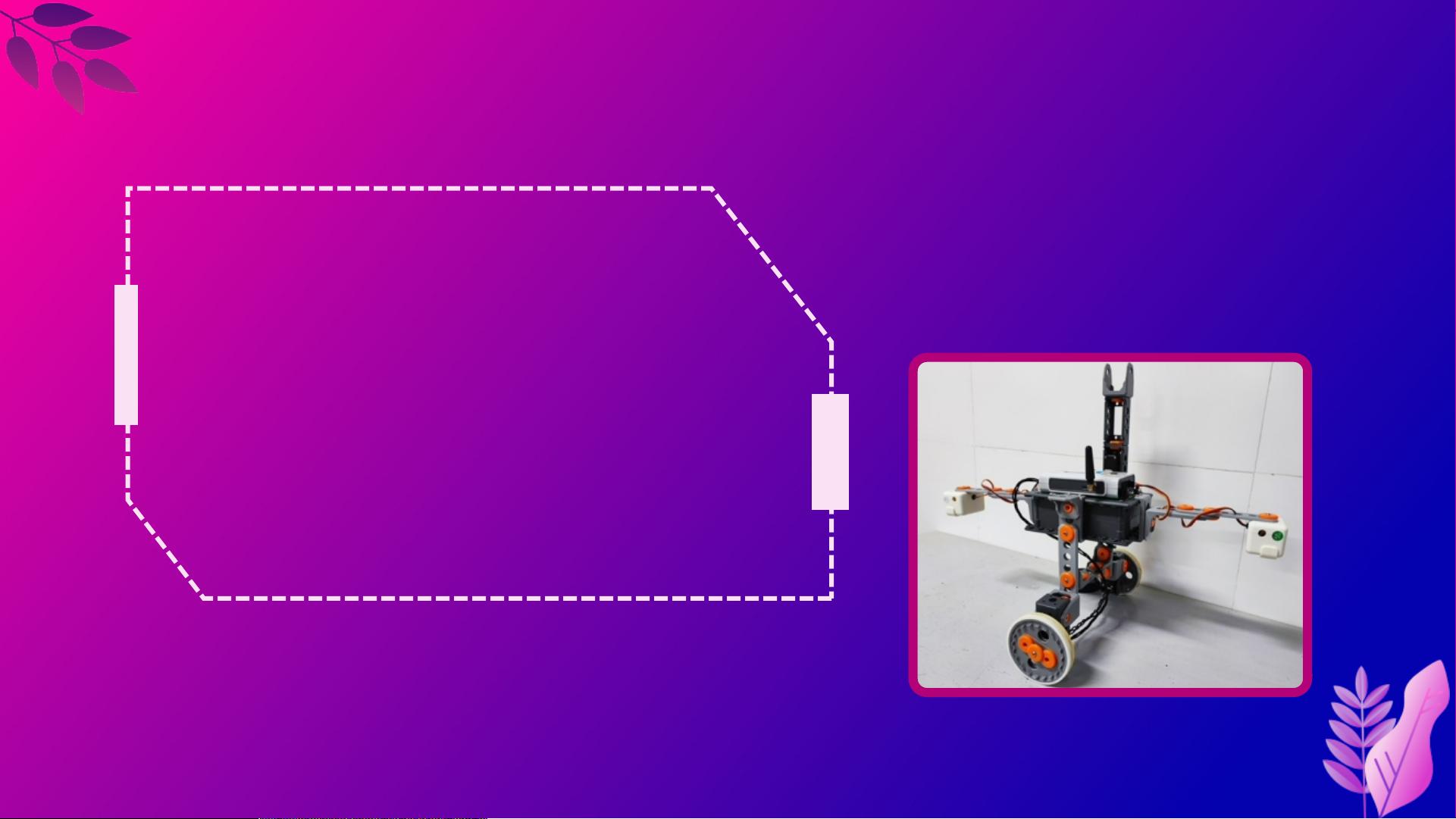
本项目主要是以两轮平衡车机器人技术为基础,在使用“创意之星”套件设计并制作一款具有自主保持动态平衡功能的机器人。两轮平衡车的概念最早由日本电信大学教授山藤一雄在1987年提出,其核心思想是利用数字处理器来检测平衡状态的改变,并通过平行双轮来维持机器的平稳。这一技术类似于一阶倒立摆,由于不稳定的动态特性,成为了验证各种控制算法的理想平台,具有重要的理论意义。全世界范围内已经出现了许多成功的两轮自平衡小车案例,而Segway代步车则成为了最成功的代表之一。
在本项目中,使用“创意之星”套件设计并制作了一款两轮平衡车机器人,其功能要求包括采用两轮结构,能够实现自主保持动态平衡。在结构框图和功能及实现部件表中可以清晰地看到其设计和具体实现。在项目实施过程中,使用了红外测距传感器作为模拟量传感器,可通过Luby Crater软件的常规监控器进行红外测距传感器的数值获取。传感器的规格数据包括探测距离为10~80cm,工作电压为4~5.5V,标准电流消耗为33~50mA,输出量为模拟量输出,输出电压和探测距离非比例相关。
总的来说,两轮平衡车机器人技术在现实生活中具有广泛的应用前景,其概念和原理都源自于日本电信大学教授山藤一雄在1987年的提出。其核心思想是利用数字处理器来检测平衡状态的改变,并通过平行双轮来维持机器的平稳。在本项目中,使用“创意之星”套件设计制作了一款具有自主保持动态平衡功能的两轮平衡车机器人,其结构框图和功能实现部件表清晰展现了其设计和实现。使用红外测距传感器作为模拟量传感器,实现了红外测距传感器的数值获取,其规格数据包括探测距离为10~80cm,工作电压为4~5.5V,标准电流消耗为33~50mA,输出量为模拟量输出,输出电压和探测距离非比例相关。在学习资讯部分则介绍了红外测距传感器的具体使用和规格数据。这一技术在现实生活中已经有许多成功的应用案例,并且具有广泛的应用前景。
二、项目描述
使用“创意之星”套件设计并制作一款两
轮平衡车机器人,功能要求如下:
采用两轮结构;
能够自主保持动态平衡。
剩余18页未读,继续阅读
2022-06-30 上传
2023-10-28 上传
2013-11-12 上传
2021-10-09 上传
2021-10-28 上传
2021-10-11 上传
2021-10-11 上传
2021-10-12 上传
2021-10-25 上传

知识世界
- 粉丝: 370
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
