8086微机控制的直流电机PID闭环调速系统设计
版权申诉
155 浏览量
更新于2024-06-25
收藏 1.38MB DOC 举报
"基于8086的小型直流电机闭环调速系统PID控制设计"
这篇文档详细阐述了一个基于8086微处理器的小型直流电机闭环调速系统的PID控制设计。该系统旨在通过精确的控制算法来实现电机速度的稳定和可调,包括本地和远程监控功能。
首先,需求分析明确了设计目标:设计一个基于80x86微机接口的控制电路,采用C语言、汇编语言或VC++编程实现硬件接口功能,其中包括电机速度的分段或连续给定,以及实时显示速度信息。系统应具备PID参数的在线显示和修改,并且支持通过串行通信进行远程监控。电机调速采用PWM技术,通过调节占空比来改变电机转速。此外,系统还要求有电机测速电路以实时反馈电机的实际速度,并使用数码管或LCD液晶进行显示。
在硬件设计部分,文档详细介绍了各个模块的功能和实现方法,包括:
1. 片选模块:用于选择微处理器与其他器件的交互。
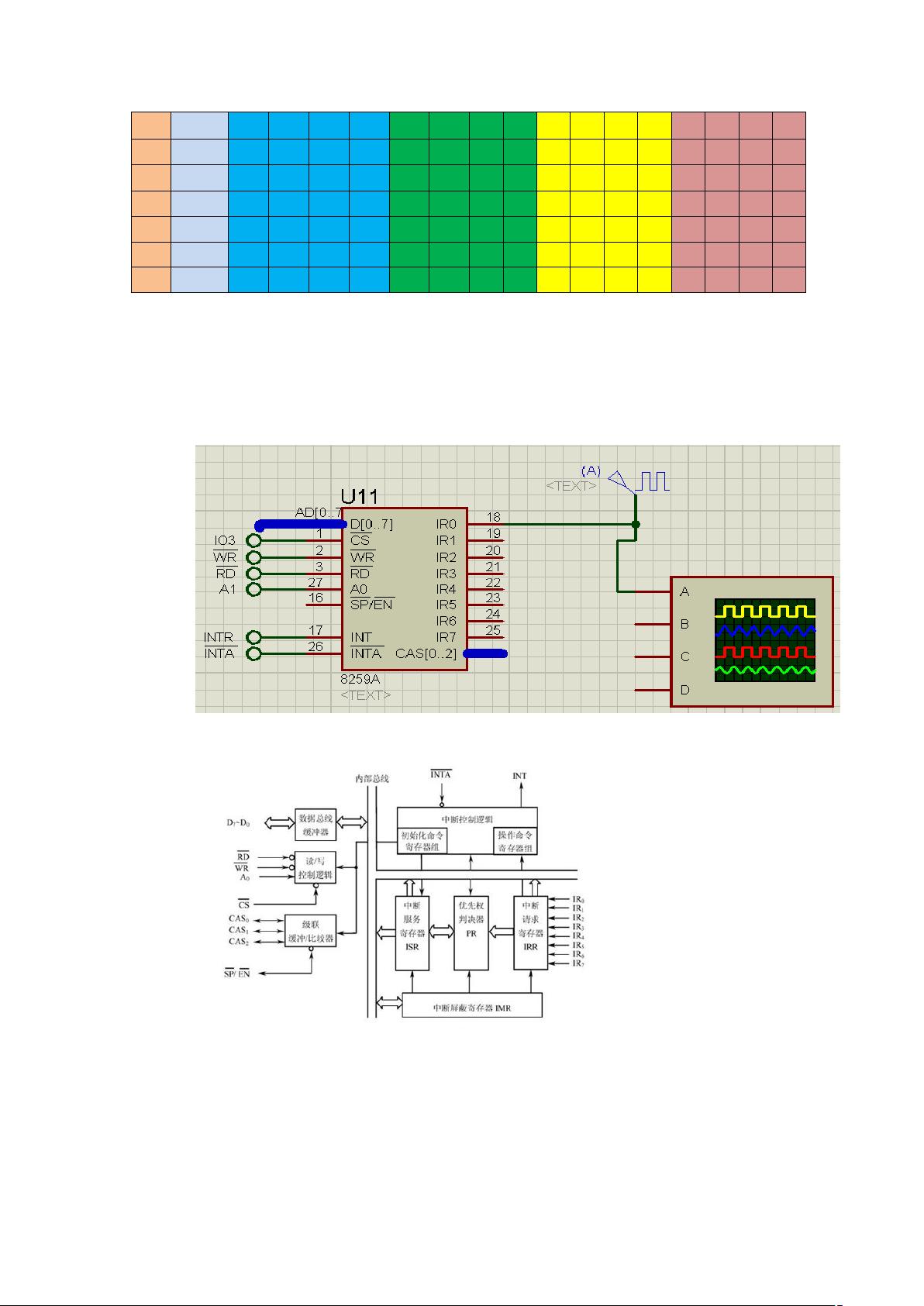
2. 中断定时模块:实现定时功能,可能用于速度控制和反馈的周期性检测。
3. PWM发生模块:生成可变占空比的PWM信号以控制电机速度。
4. 调速模块:根据输入信号调整PWM占空比,改变电机转速。
5. 测速模块:监测电机转速,可能包含霍尔效应传感器或其他测速元件。
6. 参数显示模块:显示给定速度和实际速度等信息。
7. 电机驱动模块:将微处理器的控制信号转化为足够的功率驱动电机。
8. 参数调整模块:通过拨码开关等硬件设备修改PID参数。
9. 串口通信模块:实现与上位机的串行通信,提供远程监控能力。
软件设计部分,文档提到了下位机程序的流程图和清单,包括宏定义、全局变量声明、系统初始化、主函数、中断服务子程序和显示子程序。还简要介绍了PID控制算法,这是一种广泛应用的控制策略,通过比例、积分和微分三个环节来实现快速响应和良好的稳定性。此外,还提及了使用LabVIEW制作上位机界面以及辅助软件的选择。
实验条件和模块调试章节,详细描述了每个硬件模块的调试过程,以确保整个系统能正常工作并满足性能要求。
最后,实验结果讨论及改进措施部分,对实验结果进行了分析,并提出了可能的优化方案。实验心得体会分享了设计和实施过程中学习到的经验和心得。
这个项目涉及了嵌入式系统设计、数字控制、电机驱动、PID控制理论以及通信协议等多个方面的知识,是一个综合性的工程实践。
7
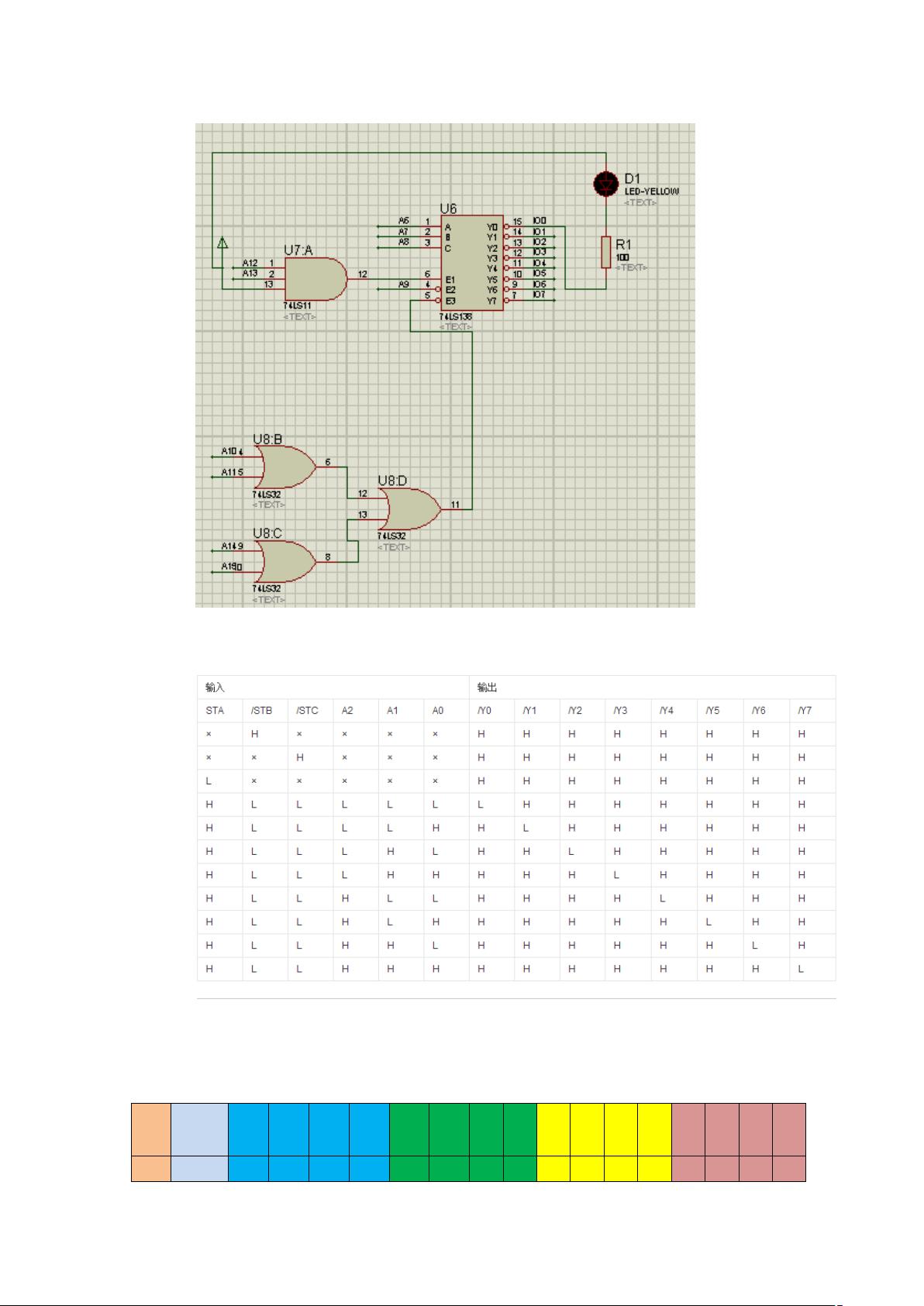
74LS138 为 3 线-8 线译码器,其真值表:
其中 74LS32 为或门:
综上可得下表:
端
口
Hex
A15
A14
A13
A12
A11
A10
A9
A8
A7
A6
A5
A4
A3
A2
A1
A0
IO0
3000H
0
0
1
1
0
0
0
0
0
0
0
0
0
0
0
0
剩余36页未读,继续阅读
2021-09-24 上传
2022-07-08 上传
2023-07-09 上传
141 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

老帽爬新坡
- 粉丝: 98
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- LINUX-1.2.13内核网络栈实现源代码分析
- EXT 中文手册.pdf
- see mips run 2nd edition(CN)
- 制造业常用英语词汇.pdf
- Spoon_User_Guide_3_0
- Apress - The.Definitive.Guide.to.SOA.BEA.AquaLogic.Service.Bus.May.2007.pdf
- 管理信息系统分析与设计—图书馆管理信息系统
- oracle体系结构
- 计算机等级考试(pc技术)
- after effect 插件应用指南(英文).pdf
- linux 网络编程笔记
- 测试知识文件(软件测试背景)
- IBM Ratioal技术白皮书_软件测试自动化技术
- spring struts hibernate 自己整理的 很不错 收集了许多题型
- sql 笔试题包含了sql的基础知识 有好几种题型 有答案
- sql 笔试题包含了sql的基础知识 有好几种题型 有答案
