PLC控制的机械手臂课程设计详解
版权申诉
"基于PLC的机械手臂控制课程设计"
本次课程设计是关于基于PLC(可编程逻辑控制器)的机械手臂控制系统的设计,主要目标是让学生深入理解和应用PLC的基本指令,进行电气控制系统的硬件和软件设计。课程以2013级电气自动化专业的学生为对象,他们在天科TKPLC-A实验装置的机器手装置上进行模拟控制实验。
一、选题背景与来源
该设计来源于实际的工业项目,旨在模拟真实环境中的机器手操作流程,如在生产线上搬运物体。学生需要在天科TKPLC-A实验装置的机器手模拟控制实验区完成整个设计。
二、训练目标
1. 熟练掌握PLC编程和程序调试。
2. 学会绘制电气原理图和接线图。
3. 选择合适的电气元件。
4. 设计系统硬件和软件。
5. 完成模拟实验。
6. 编写技术文档。
三、功能实现
设计的机械手应能完成以下任务:从A点抓取物体,移动至B点,期间包括原位、下降、抓取、上升、左右移动等动作,同时利用限位开关监控位置,双线圈二位电磁阀驱动气缸执行动作。改进方案中,增加了压力传感器来监测机器手爪的压力并进行反馈控制,以及超声波传感器检测物体是否滑落,异常情况下触发报警。
四、实验设备
1. 配备STEP7-Micro/WIN32编程软件的计算机。
2. 天科TKPLC-A实验装置。
3. 机器手模块。
五、设计任务
1. 分析控制需求,设计硬件系统。
2. 绘制电气原理图和PLC I/O接线图。
3. 设计软件系统。
4. 组装控制系统。
5. 调试系统,实现预期功能,完成模拟实验。
6. 编写课程设计说明书。
六、参考资料
参考书籍包括天科TKPLC-A实验装置实验手册、S7-200可编程序控制器手册以及《现代电器控制及PLC应用技术》第二版。
在整个设计过程中,PLC扮演着核心角色,它是一种微处理器为核心的工业控制设备,能执行逻辑运算、顺序控制、定时、计数和算术运算等功能,并通过数字和模拟输入输出控制各种设备或生产过程。这种控制器以其简单、易用、高可靠性、通用性和灵活性著称,广泛应用于各种工业领域,例如机床工件装卸、电子组装等复杂或危险的工作环境。
通过这次课程设计,学生不仅能够理论联系实际,提升PLC编程技能,还能锻炼解决实际问题的能力,为未来从事自动化领域的工程工作打下坚实基础。
第 1 章 机器手控制系统方案设计
整个设计历程是按工艺流程设计,为设备安装、运行和掩护检验办事,设计的编号
凭据国度关于电气自动化工程设计中的电气设备常用根本图形标记(GB4728)及其他相
关尺度和范例编写。任何一种控制系统都是为了实现被控东西的工艺要求,以提高生产
效率和产物质量。因此,在设计 PLC 控制系统时,应遵循以下根本原则:
(1) 最大限度地满足被控东西的控制要求;(2) 包管 PLC 控制系统宁静可靠;(3) 力
求简朴、经济、使用及维修方便;(4) 适应生长的需要
对付本课题来说,机器手抓行动历程和抓取物件的控制与升级,控制装置需要凭据
企业设备和工艺现况来组成并需尽可能的利用旧系统中的元器件。对付人机交互方法改
革后系统的操纵模式应尽量和改革前的相类似,以便于操纵人员迅速掌握。要实现整个
机器手控制系统的设计,需要从怎样实现多个电磁阀的开关以及电动机启动的控制这个
角度去考虑,现在就这个问题的如何实现以及选择怎样的要领来确定系统方案。
1.2 系统的整体设计要求
在该机器手控制系统中,需要完成抓取、移动、放松、回到原位等功效,控制要求如
下:
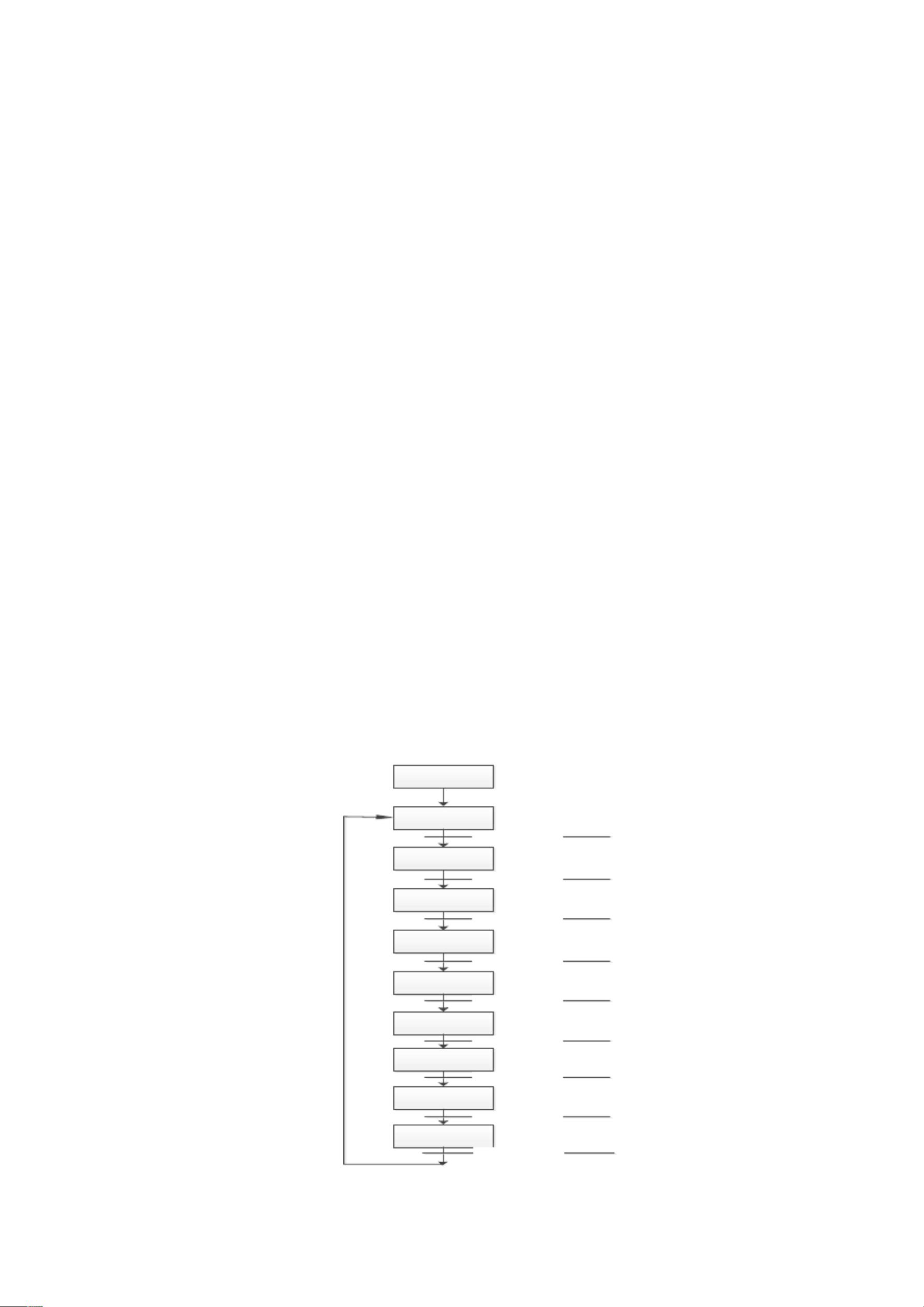
机器手行动流程图
手臂下降
下降到位
左工作台
物品到位
抓
抓紧到位
手臂上升
上升到位
手臂右转
右转到位
手臂下降
下降到位
放松
放松到位
手臂上升
上升到位
原位
重复执行

剩余38页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-11 上传
2022-07-12 上传
2022-11-13 上传
2023-09-16 上传
2023-09-01 上传

不吃鸳鸯锅
- 粉丝: 8512
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
