UAV数据链路在AGIVN中的抗干扰优化策略
PDF格式 | 1.85MB |
更新于2024-07-15
| 115 浏览量 | 举报
本文主要探讨了在物联网(IoT)的关键应用之一——车对车(VANET,Vehicular Ad-Hoc Networks)的基础上,如何通过集成无人驾驶航空器(UAV,Unmanned Aerial Vehicles)来构建空地综合车载网络(AGIVN,Air-Ground Integrated Vehicular Networks),以提升智能交通系统(ITS,Intelligent Transportation System)的性能。AGIVN的优势在于其广泛的覆盖范围和灵活的配置,这使得它们在通信效率和可靠性方面超越传统的地面VANET。
研究的核心焦点是无人机数据链路(即无人机与地面车辆、基础设施之间的通信链接)的抗干扰方案。在VANET中,由于无线环境的复杂性和多变性,如电磁干扰、信号衰减以及多径效应,确保数据传输的稳定性和安全性至关重要。文章提出了一种针对AGIVN中UAV数据链路的抗干扰策略,旨在解决这些挑战:
1. **环境感知与适应**:首先,研究者强调了实时环境感知的重要性,通过传感器技术(如sensors)收集周围电磁环境的数据,包括信号强度、干扰源位置等,以便实时调整通信参数。
2. **频谱管理与资源优化**:为了减少与其他无线系统的冲突,文中可能涉及频谱管理和动态资源分配策略,通过智能算法选择最佳的通信频率和带宽,以避开干扰频段。
3. **信道编码与调制**:采用先进的信道编码和调制技术,如纠错编码和多进制调制,提高数据传输的抗干扰能力,确保在高噪声环境下仍能维持可靠的数据传输。
4. **物理层设计**:文章可能会深入到物理层的设计,包括使用MIMO(Multiple Input Multiple Output)技术,增加数据传输的冗余度,增强抵抗干扰的能力。
5. **自适应通信协议**:针对AGIVN的特性,可能开发了自适应通信协议,根据飞行状态、交通密度变化等因素动态调整通信协议,确保在不同场景下的高效通信。
6. **协同通信与分布式处理**:UAV和其他车辆可能通过协作来共享通信资源,形成分布式处理架构,共同对抗干扰,提高整体网络的鲁棒性。
7. **仿真与评估**:最后,论文可能包含了详细的仿真和评估部分,通过仿真环境测试抗干扰策略的效果,验证其实用性和有效性。
该研究论文深入探讨了在空地综合车载网络中,通过无人机数据链路的抗干扰技术,旨在提升网络的可靠性和效率,以支持智能交通系统的无缝运行。通过结合先进通信理论、环境感知和智能控制,本文为未来智能交通网络的发展提供了有价值的技术支撑。
Sensors 2019, 19, 4742 4 of 19
Then, we adopt binary phase shift keying (BPSK) modulation for the signal; the transmitted signal
s(t) can be expressed as
s(t) =
√
2Px(t)g(t) cos ω
0
t, (5)
where P is the carrier power and ω
0
is the angular frequency.
Finally, we unpack and filter the information on SRX, which can be expressed as
s
‘
(t) = A
√
2Px(t − T
d
)g(t − T
d
)g(t − T
‘
d
)[cos ω
0
(t − T
d
) + ϕ], (6)
where
T
d
is the information delay,
A
is the spreading gain,
ϕ
is the random phase,
g(t − T
‘
d
)
is the
despreading sequence, and T
‘
d
is the information delay estimate, when T
d
=T
‘
d
, g(t − T
d
)g(t − T
‘
d
)=1.
Filter
Recovery
Signal
SS Signal
Interference Signal
Signal
Spreading Code
Spreading Code
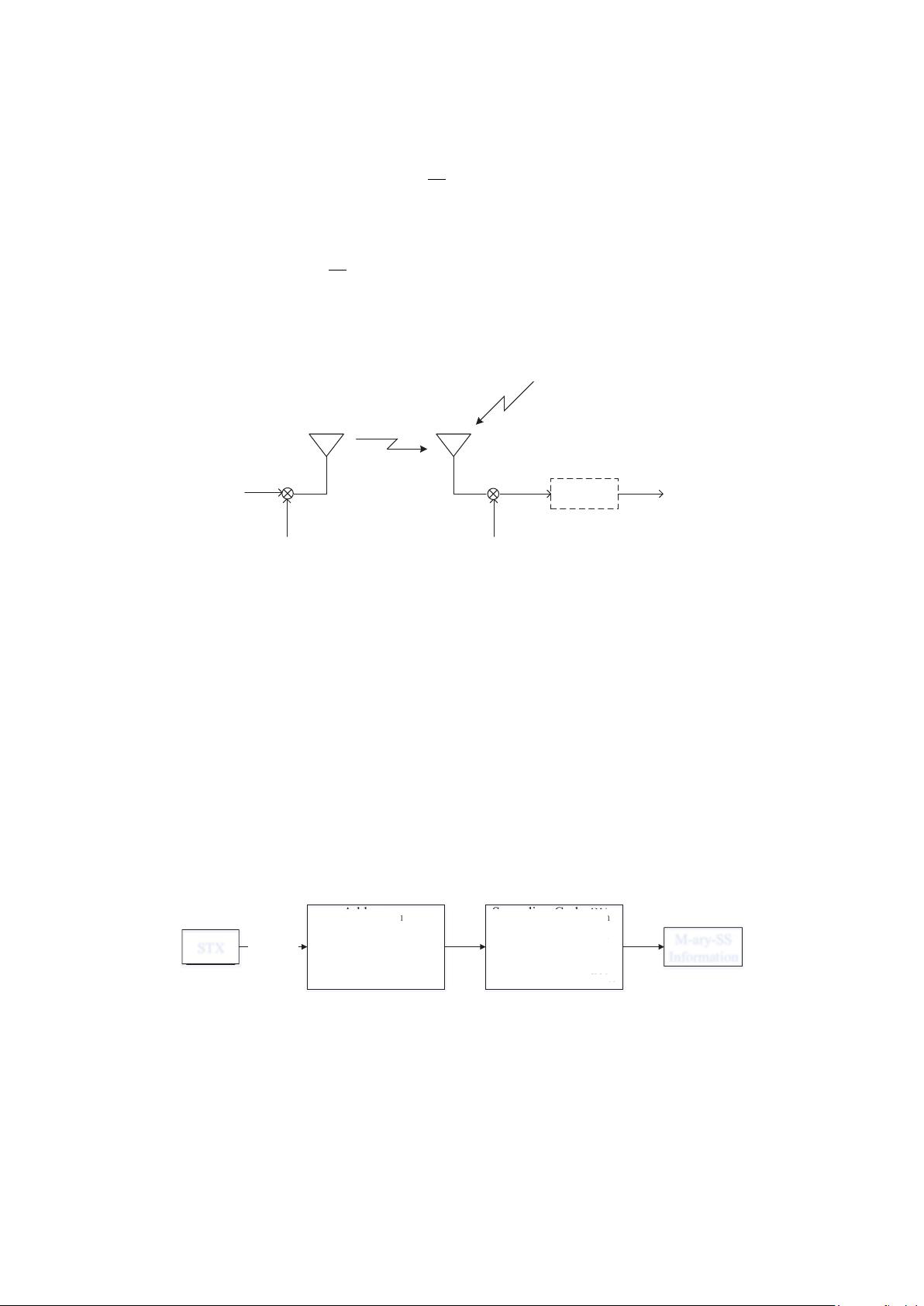
Figure 1. DSSS technology schematic.
The authors of [
16
] proposed a communication system based on the DSSS to reduce the BER
by increasing STX power. L. Xiao et al. [
17
] used chaotic map sequences to improve the security
of the DSSS anti-interference ability of the system without increasing the spread spectrum sequence.
In addition, the DSSS is applicable to the actual engineering field by using field-programmable gate
array (FPGA) [18].
Although the DSSS technology is easy to implement, it has some disadvantages. Because DSSS
bandwidth is large, it is vulnerable to EMI. For instance, when the intensity of interference signal
exceeds the gain range of DSSS, the system will not transmit the information correctly [19].
2.3. M-Ary Spread Spectrum
The DSSS system improves the anti-interference performance of the system by improving the
transmission bandwidth of the system. However, in a real scenario, the system bandwidth is limited
and cannot be expanded arbitrarily. Therefore, we use the M-ary spread spectrum to increase the
spreading gain. Figure 2 is a schematic diagram of the M-ary spread spectrum technology [20].
STX
1
2
Address
Address
...
Address
M
a
a
a
1
2
A
A
d
d
d
d
ress
Address
...
Address
M
a
a
a
1
2
Spreading Code
Spreading Code
...
Spreading Code
M
PN
PN
PN
1
2
S
S
prea
d
d
i
i
ng
C
C
o
d
d
e
Spreading Code
...
Spreading Code
M
P
P
N
N
1
PN
2
PN
M
M-ary-SS
Information
k Bit Information
Figure 2. M-ary spread spectrum technology schematic.
As shown in Figure 2, the STX needs to transmit
k
bits information, and convert the
k
bits
information into
M
addresses (
M = 2
k
). Each address corresponds to a pseudo-noise (PN) code,
and PN codes are orthogonal to each other.
DSSS spreading gain can be expressed as
G
p
(dB) = 10log
10
(N
p
), (7)
where N
p
is the spreading code length of DSSS.
剩余18页未读,继续阅读
相关推荐





weixin_38644780
- 粉丝: 2
- 资源: 886
 我的内容管理
展开
我的内容管理
展开







最新资源
- 《Velocity1.4 模板使用指南中文版》
- 一些vfp实用代码如登录界面代码 打印代码
- ALV编程手册(An Easy Reference for ALV GRID CONTROL.)
- SVN操作入门指南.pdf
- 谭浩强_C++程序员设计_pdf(将各章整合都一起了)
- OpenDoc-CruiseControl.pdf
- DataWindow .net 汉化版 电子书
- 持续集成配置.pdf
- MT6228手机基带IC PDF档
- Const的所有用法by Dan Saks
- 深入浅出Struts 2.pdf
- AN INTRODUCTION TO STOCHASTIC
- web.xml详细配置说明
- javaweb ATA认证题库
- 整合Flex和Java--配置篇
- svn使用说明的PPT
