"51单片机步进电机控制-设计报告及源程序详解"
184 浏览量
更新于2024-01-01
收藏 241KB DOC 举报
步进电机是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号时,它会驱动步进电机按照设定的方向旋转一个固定的角度,也就是步进角。通过控制脉冲的个数,可以控制步进电机的角位移量,从而实现准确定位的目的。同时,通过控制脉冲的频率,可以控制步进电机的转动速度和加速度,实现调速的功能。
步进电机有三种主要的种类:永磁式(PM)、反响式(VR)和混合式(HB)。永磁式步进电机通常是两相的,具有较小的转矩和体积,步进角一般为7.5度。永磁式步进电机广泛应用于定位控制等领域。
步进电机的控制需要借助驱动电路。驱动电路是将信号转换成电流来驱动步进电机的关键部件。根据不同的步进电机类型和驱动需求,选择合适的驱动电路非常重要。
-51单片机是一种常用于嵌入式系统的微控制器。它具有较高的性能和稳定性,并且易于编程。基于-51单片机的步进电机控制设计,可以实现对步进电机的准确定位和调速。
设计报告说明书的源程序提供了基于-51单片机步进电机控制的详细实现代码。在这份文档中,可能包括步进电机的硬件设计,包括电源电压和驱动电路的设计;步进电机的软件设计,包括-51单片机的编程实现和脉冲信号的生成;以及步进电机控制的测试和调试过程。
通过这份设计报告说明书和源程序,可以了解到步进电机控制的原理和实现方法。在实际应用中,可以根据具体需求进行相应的修改和优化,从而实现更加精确和高效的步进电机控制。
需要注意的是,在进行步进电机控制时,需要考虑到电机的负载特性、驱动电流和电压等因素。合理选择驱动电路和电机参数,可以提高步进电机的控制精度和响应速度。
总之,基于-51单片机步进电机控制的设计报告说明书和源程序提供了一种实现步进电机准确定位和调速的方法。通过仔细研究文档中提供的设计思路和源代码,可以掌握步进电机控制的基本原理和实现方式,为实际应用提供有用的参考。同时,需要根据具体需求进行相应的调整和优化,以实现更好的控制效果。
-
-
- word.zl
1
2
3
7
14
U1A
4
5
6
U1B
8
9
10
U1C
11
12
13
U1D
R1
R2
R3
R4
R5 R6
R7
R8
R9
Q1
Q2
Q3 Q4
GND GND
GND
5V
D1 D2 D3 D4
3
2
1
8
4
U2A
5
6
7
U2B
RV1
5V
5V
GND
AIN
/AIN
BIN
/BIN
COM
GND
+1 2V
AOUT /AOUT BOUT /BOUT
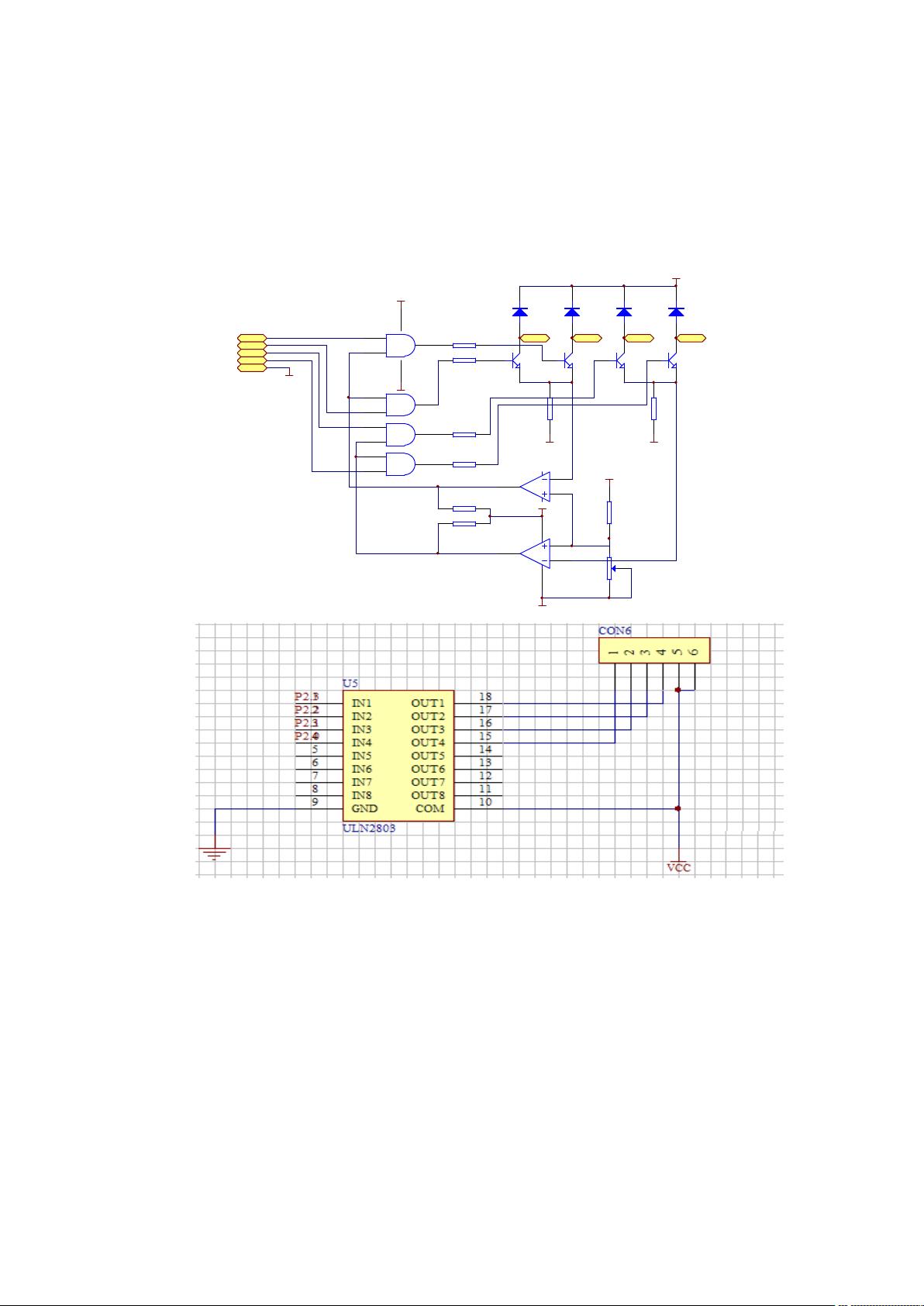
2.4 驱动电路设计
驱动电路可分为:三极管直接驱动〔图 3〕,采用斩波恒流驱动方式〔图 2.41〕和芯片
驱动电路等。驱动电路的性能直接关系到步进电机走步的准确与稳定。本电路采用驱动芯片
ULN2803。ULN2803 是一种大电流高电压型器件,外电路简单〔图 2.42〕。
图 2.41
图
2.42
三 电路设计
3.1、设计要点和软硬环境
1、步进电机的设计要点和软硬件环境
剩余15页未读,继续阅读
2024-02-20 上传
2024-10-27 上传
534 浏览量
1499 浏览量
1635 浏览量
2025 浏览量
274 浏览量

Mmnnnbb123
- 粉丝: 765
 我的内容管理
展开
我的内容管理
展开







最新资源
- Visual Studio 2008:十大革新特性,包括LINQ和代码段编辑器
- CMPP2.0短信网关接口开发详解:协议结构与消息定义
- InfoQ出品:免费在线《深入浅出Struts2》教程
- Windows服务器2003数字证书与PKI实战指南
- C++TEST中文文档:代码标准分析和单元测试报告
- JS表单验证技巧集:字符限制、字符类型检测
- 一键式解决Java桌面应用的部署难题
- Android程序设计大赛I:20佳获奖作品展示与创新应用解析
- Oracle DBA基础教程:从开机到管理全记录
- 《人件》:软件工程中的人的因素与团队生产力
- 全球移动通信系统GSM:原理与频段解析
- 《Linux内核0.11完全注释》:深入理解操作系统核心
- 浅析计算机键盘构造与PS/2接口原理详解
- SIMATIC S7-300编程手册:STL指令详解
- Visual Source Safe (VSS) 在软件开发中的应用
- Java命令参数详解:从基础到扩展
