SAR图像识别:邻域几何中心缩放嵌入法
53 浏览量
更新于2024-08-26
收藏 1.82MB PDF 举报
"SAR ATR的邻域几何中心缩放嵌入是一种基于流形学习理论的新型特征提取方法,特别适用于高维合成孔径雷达(SAR)图像的自动目标识别(Automatic Target Recognition, ATR)。该方法的核心是通过邻域几何中心缩放来构建样本间的邻域关系,从而在降维过程中保持清晰的聚类结构,提高分类效果,并降低邻域参数对识别性能的影响。实验证明,这种方法在识别性能和稳定性上优于其他现有的方法。"
在SAR ATR中,特征提取是一个至关重要的环节,因为它直接影响到后续的目标检测和识别效率。传统的特征提取方法可能在处理高维SAR数据时遇到困难,因为这些数据通常包含大量的冗余和噪声。而邻域几何中心缩放嵌入技术为解决这一问题提供了一种创新的途径。
该方法基于流形学习理论,流形学习是一种试图从高维数据中找到低维结构的方法,它假设数据点在某种意义上近似地分布在低维流形上。在SAR ATR的上下文中,这个流形可能代表了不同目标类别的分布。通过邻域几何中心缩放,该方法可以更准确地捕捉样本之间的局部结构,这有助于在降维后保持原有的类别信息,使得聚类更加明显,从而提高分类准确性。
邻域几何中心缩放的引入解决了两个关键问题:一是增强了样本在降维空间中的聚类性,使得同类目标更容易被区分;二是减少了邻域参数变化对识别性能的敏感性,这意味着方法对数据的预处理要求更低,具有更好的鲁棒性。这在实际应用中非常重要,因为SAR图像的获取条件可能因时间和环境因素而变化,对参数的不敏感性有助于提高系统的稳定性和适应性。
实验结果基于Moving and Stationary Target Acquisition and Recognition (MSTAR)数据库,这是一个广泛用于评估SAR ATR技术的标准数据集。实验显示,采用邻域几何中心缩放嵌入的方法在识别性能上表现出显著优势,这表明它有潜力成为SAR ATR领域的一个有力工具。
邻域几何中心缩放嵌入为高维SAR图像的特征提取提供了一个新的视角,它的优越性能和稳定性使其在复杂雷达目标识别任务中具有广阔的应用前景。未来的研究可能会进一步优化这一方法,例如通过改进邻域构造策略或结合其他机器学习算法,以提高识别速度和精度,同时保持方法的简洁性和有效性。
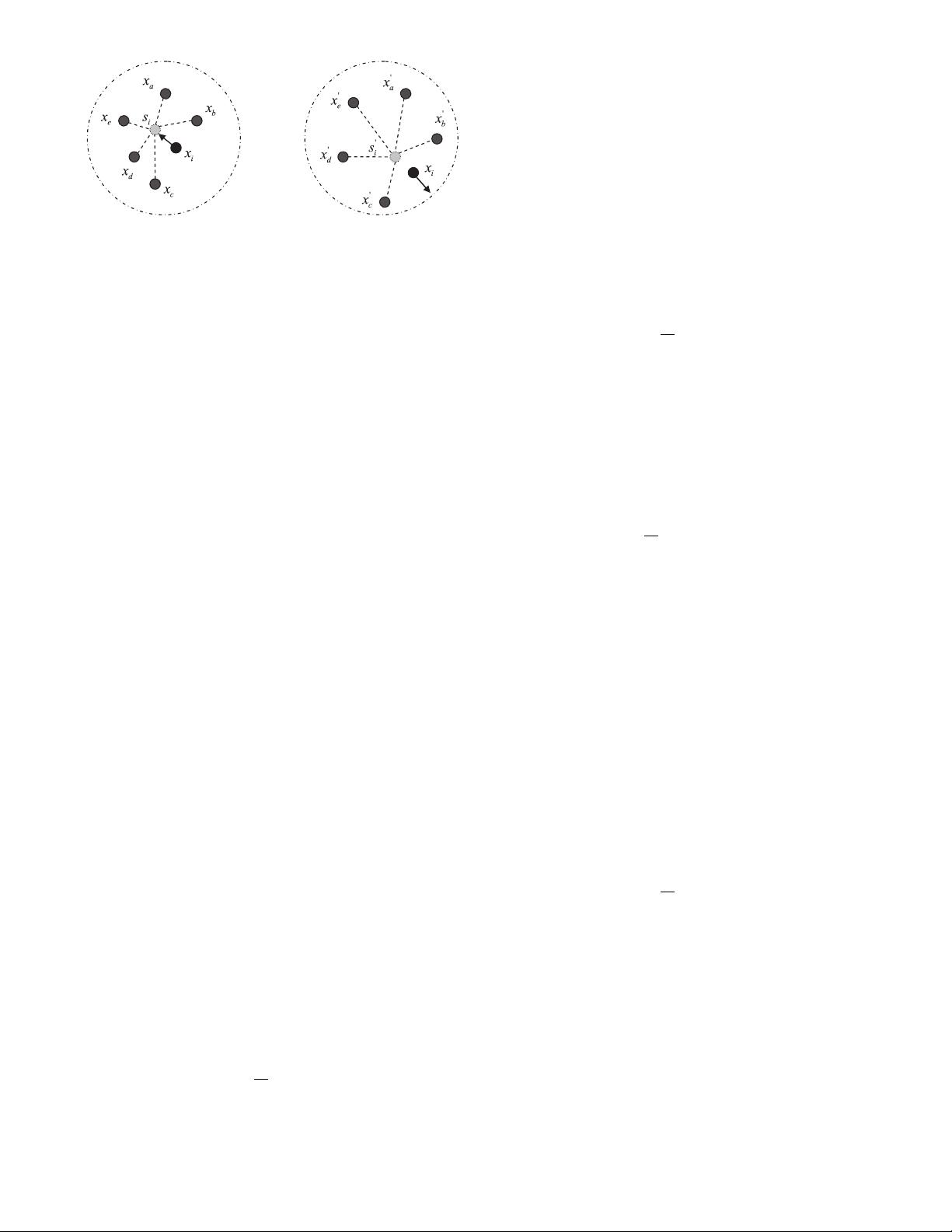
Fig. 1. Sample’s clustering direction in its (a) within-class
neighborhood and (b) between-class neighborhood for NGCSE.
III. NEIGHBORHOOD GEOMETRIC CENTER
SCALING EMBEDDING
To endow the samples with clear clustering directions
and enhance the algorithm’s stability, we introduce the
geometric center scaling into the neighborhoods. First, we
compute the geometric center of the within-
class neighborhood and the geometric center of the
between-class neighborhood for each sample. After that,
we establish spatial relationship between each sample x
i
and its within-class neighborhood geometric center s
i
,as
well as the one between each sample x
i
and its
between-class neighborhood geometric center s
i
.Thenan
embedding can be obtained by solving an optimization
problem. When being embedded into a low-dimensional
subspace, each sample gets close to its within-class
neighborhood geometric center yet is prevented from
approaching its between-class neighborhood geometric
center as much as possible, as shown in Fig. 1 . Finally,
the purpose of classification is achieved.
Let M be a manifold embedded in R
n
, given training
dataset
{
x
i
∈ R
n
,i = 1, 2,...,N
}
∈ M. Corresponding
data class labels are
{
y
i
∈ [1, 2,...,c],i = 1, 2,...,N
}
,
where N denotes the amount of the training dataset and c
denotes the class number of the training dataset. Any
subset of data points that belong to the same class is
assumed to lie on a submanifold of M. In NGCSE, an
embedding based on linear projection is constructed:
V ∈ R
n×l
: x
i
∈ R
n
→ z
i
= V
T
x
i
∈ R
l
, (l n). Via
embedding, each sample in the low-dimensional space
moves toward its within-class neighborhood geometric
center but keeps away from its between-class
neighborhood geometric center.
We calculate the within-class neighborhood N
+
k
1
(i)and
between-class neighborhood N
+
k
2
(i) for each sample x
i
.
Here N
+
k
1
(i) indicates the set of the k
1
nearest neighbors of
the sample x
i
in the same class and N
−
k
2
(i) indicates the set
of the k
2
nearest neighbors of the sample x
i
from different
classes.
The within-class neighborhood geometric center s
i
for
each sample can be computed as
s
i
=
1
k
1
k
1
m
1
=1
x
m
1
(5)
where x
m
1
∈ N
+
k
1
(i).
The within-class objective function is defined here as
J
w
(V )=
i,j
z
i
− c
j
2
w
ij
=
i,j
V
T
x
i
− V
T
s
j
2
w
ij
. (6)
where W = [w
ij
] ∈ R
N×N
is the affinity weight matrix,
which is defined in this instance as
w
ij
=
exp{−x
i
− s
j
2
}, if i = j
0, otherwise
. (7)
In addition,
c
j
= V
T
s
j
=
1
k
1
k
1
m
1
=1
V
T
x
m
1
. (8)
J
w
(V ) demonstrates the spatial relationships between
the samples and their respective within-class
neighborhood geometric centers: the smaller the value of
J
w
(V ), the closer the samples are to their within-class
neighborhood geometric centers.
The between-class neighborhood geometric center s
i
for each sample can be computed as
s
i
=
1
k
2
k
2
m
2
=1
x
m
2
(9)
where x
m
2
∈ N
−
k
2
(i).
The between-class objective function is defined in this
instance as
J
b
(V ) =
i,j
z
i
− c
j
2
w
ij
=
i,j
V
T
x
i
− V
T
s
j
2
w
ij
.
(10)
where W
= [w
ij
] ∈ R
N×N
is the penalty weight matrix,
whichisdefinedhereas
w
ij
=
exp
−
x
i
− s
j
2
, if i = j
0, otherwise
. (11)
In addition,
c
j
= V
T
s
j
=
1
k
2
k
2
m
2
=1
V
T
x
m
2
. (12)
J
b
(V ) demonstrates the spatial relationships between
the samples and their respective between-class
neighborhood geometric centers: the larger the value of
J
b
(V ), the farther the samples are from their
between-class neighborhood geometric centers.
Referring to (6), we can infer that
J
w
(V ) =
i,j
z
i
− c
j
2
w
ij
=
i,j
V
T
x
i
− V
T
s
j
2
w
ij
182 IEEE TRANSACTIONS ON AEROSPACE AND ELECTRONIC SYSTEMS VOL. 50, NO. 1 JANUARY 2014
剩余12页未读,继续阅读
2013-10-23 上传
502 浏览量
2024-06-18 上传
321 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38529436
- 粉丝: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- VB通过Modbus协议控制三菱PLC通讯实操指南
- simfinapi:R语言中简化SimFin数据获取与分析的包
- LabVIEW温度控制上位机程序开发指南
- 西门子工业网络通信实例解析与CP243-1应用
- 清华紫光全能王V9.1软件深度体验与功能解析
- VB实现Access数据库数据同步操作指南
- VB实现MSChart绘制实时监控曲线
- VC6.0通过实例深入访问Excel文件技巧
- 自动机可视化工具:编程语言与正则表达式的图形化解释
- 赛义德·莫比尼:揭秘其开创性技术成果
- 微信小程序开发教程:如何实现模仿ofo共享单车应用
- TrueTable在Windows10 64位及CAD2007中的完美适配
- 图解Win7搭建IIS7+PHP+MySQL+phpMyAdmin教程
- C#与LabVIEW联合采集NI设备的电压电流信号并创建Excel文件
- LP1800-3最小系统官方资料压缩包
- Linksys WUSB54GG无线网卡驱动程序下载指南
