多AUV水下编队控制技术研究
需积分: 0 177 浏览量
更新于2024-07-01
收藏 9.81MB PDF 举报
"上海海事大学博士研究生李欣的学位论文专注于多自治水下机器人(AUV)的水下编队控制技术的研究。该论文详细探讨了如何在复杂的海洋环境中,利用人工智能、自动控制和模式识别等技术,使AUV在无物理连接和无人驾驶的情况下,自主执行预定任务。编队控制技术在此扮演着重要角色,它要求多个AUV在执行任务的同时保持特定队形,并能适应环境变化,如避开障碍物和应对海流的影响。论文提出了结合改进的自组织映射神经网络(SOM)、自组织人工势场(APF)和自适应高阶滑模控制(SMC)的方法来实现这一目标,旨在提升多AUV在资源有限条件下的编队作业效率和障碍规避能力。"
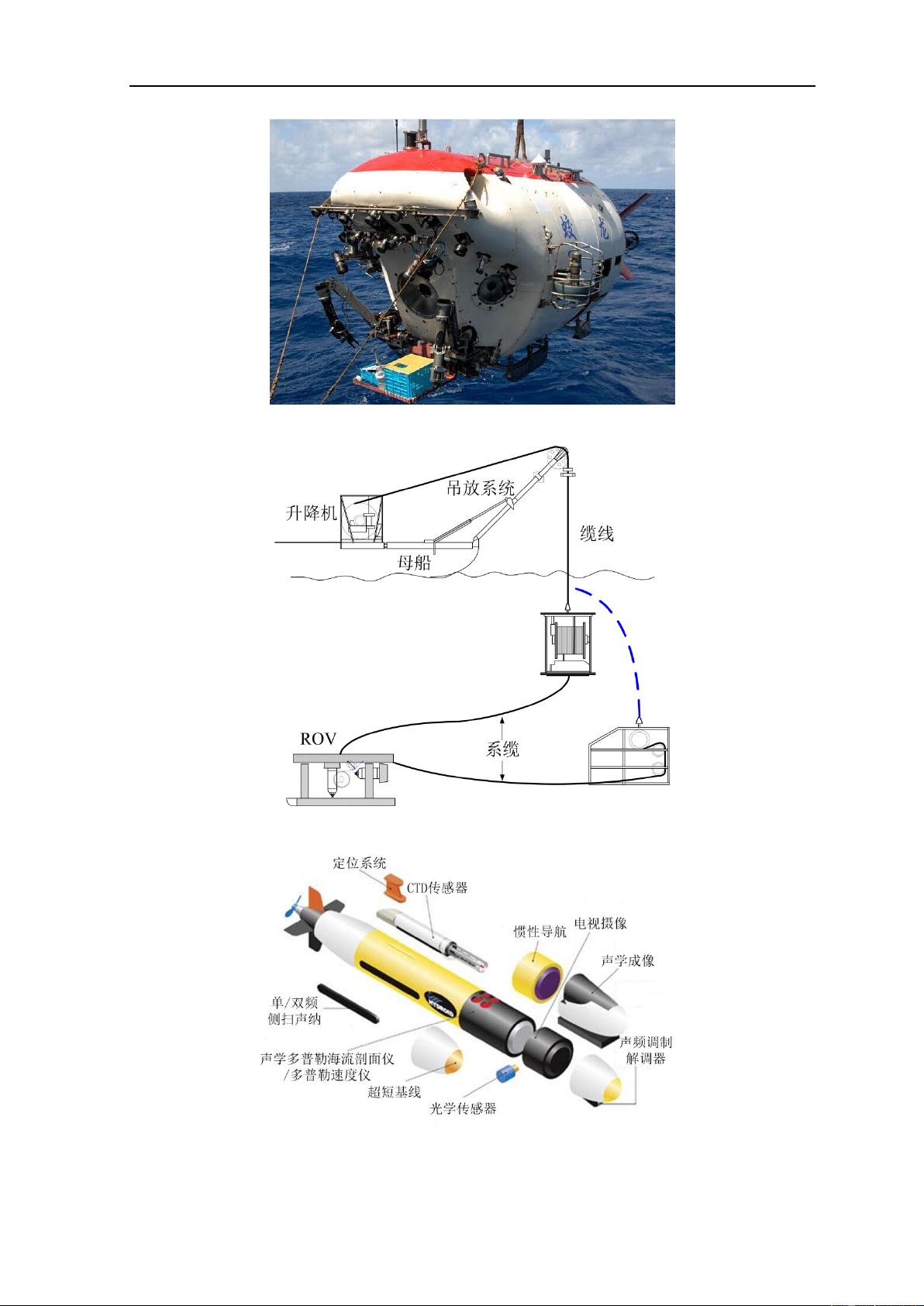
本论文的研究焦点在于解决多AUV水下编队控制的问题,这是一个涉及多领域知识的综合性课题。AUV作为一种集人工智能、自动控制等先进技术于一体的无人水下设备,能够在没有物理联系的情况下,依赖自身的智能系统执行海洋探索和作业任务。论文的核心内容是编队控制技术,它要求AUV群体在执行任务时既要保持特定的队形,又要具备动态适应环境的能力,比如遇到障碍物时的规避策略。
编队控制的实现通常涉及到多种控制策略的综合运用。本论文提出采用改进的自组织映射神经网络(SOM),这种网络能够通过自我学习和组织,帮助AUV群体形成和维持队形。同时,结合自组织人工势场(APF)理论,通过构建虚拟的势场环境,引导AUV避开障碍物并趋向于目标位置。此外,自适应高阶滑模控制(SMC)方法的应用,则是为了增强系统的稳定性和鲁棒性,即使在存在不确定性因素如海流扰动的情况下,也能确保AUV的精确控制。
李欣的论文还强调了在实际海洋环境中的应用挑战,如能源限制和高度自治的需求,这些都是多AUV编队控制研究必须考虑的关键因素。通过这些先进的控制策略,论文旨在提供一套有效解决方案,使得AUV能够在复杂环境下有效地协同工作,提高海洋作业的效率和安全性。
这篇博士学位论文不仅深入研究了多AUV编队控制的技术理论,还展示了其在实际海洋环境中的应用潜力。通过融合多种控制理论和技术,为未来AUV的编队控制设计提供了重要的理论基础和实践参考。



124 浏览量
点击了解资源详情
点击了解资源详情
124 浏览量
2022-08-03 上传
2017-12-04 上传
2023-06-30 上传
141 浏览量

刘璐璐璐璐璐
- 粉丝: 36
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网页自动刷新工具 v1.1 - 自定义时间间隔与关机
- pt-1.4协程源码深度解析
- EP4CE6E22C8芯片三相正弦波发生器设计与实现
- 高效处理超大XML文件的查看工具介绍
- 64K极限挑战:国际程序设计大赛优秀3D作品展
- ENVI软件全面应用教程指南
- 学生档案管理系统设计与开发
- 网络伪书:社区驱动的在线音乐制图平台
- Lettuce 5.0.3中文API文档完整包下载指南
- 雅虎通Yahoo! Messenger v0.8.115即时聊天功能详解
- 将Android手机转变为IP监控摄像机
- PLSQL入门教程:变量声明与程序交互
- 掌握.NET三层架构:实例学习与源码解析
- WPF中Devexpress GridControl分组功能实例分析
- H3Viewer: VS2010专用高效帮助文档查看工具
- STM32CubeMX LED与按键初始化及外部中断处理教程
