51单片机Proteus仿真:共阴点阵LED逐行驱动详解
需积分: 18 57 浏览量
更新于2024-09-11
收藏 137KB DOC 举报
本文主要介绍了如何在Proteus环境中利用51单片机和C语言编程实现点阵LED的驱动仿真。首先,逐行寻址驱动技术是核心概念,它利用两组垂直排列的行电极和列电极控制LED矩阵的显示。在逐行扫描过程中,单片机依次为每一行分配信号,然后切换到下一行,确保每个像素点逐一点亮或熄灭。
共阴和共阳点阵LED是两种常见的LED结构,共阴点阵的特点是LED的阴极连接行线,阳极连接列线。驱动电压表给出了详细的电极操作规则,例如行电极寻址时应为低电平,无数据时为高电平,以便正确控制LED的亮暗状态。
文章接下来具体描述了一个5x7共阴点阵LED字符显示的实例。在这个项目中,使用了AT89C52单片机作为主控制器,P0.0~P0.7脚作为行控制信号,通过上拉电阻增强驱动能力;而P2.0~P2.5脚则用于列控制。在Keil软件平台上,开发者将编写C语言代码,遵循逐行寻址逻辑,设置相应的电平来驱动LED矩阵显示字符。
C语言程序设计部分是关键步骤,编程思路强调了共阴点阵LED的特点,即在行电极寻址时必须设置为低电平,以实现正确的点亮效果。通过编写驱动函数,程序员能够控制LED阵列的每个像素点,进而构建出所需的字符或图形。
这篇文章提供了从硬件连接到软件编程的完整过程,展示了如何在Proteus环境中使用C语言驱动51单片机控制点阵LED的实例,这对于学习和实践微控制器基础以及LED显示技术具有重要的参考价值。
基于 Protus 的点阵 LED 的仿真驱动
一、原理:
1、逐行寻址驱动技术
平板显示器件像素采取点矩阵排列,两组等距平行排列的电极在空间相互
垂直。分别称为行电极(扫描电极 Xi)和列电极(信号电极 Yj),在交叉点形成像
素。在逐行寻址方式下,行的功能是扫描寻址,列的功能是给像素施加信号,
并且列的数据信号与显示屏的显示信息一一对应。
逐行扫描寻址方式:在某一时刻选中某一行 X
i
,同时所有列上的信号同时
从一行存储器中释放给相应列电极显示,而后再换成 X
i+1
进行显示。这就是所
谓的“一次一行显示”。
2、点阵型 LED 的驱动
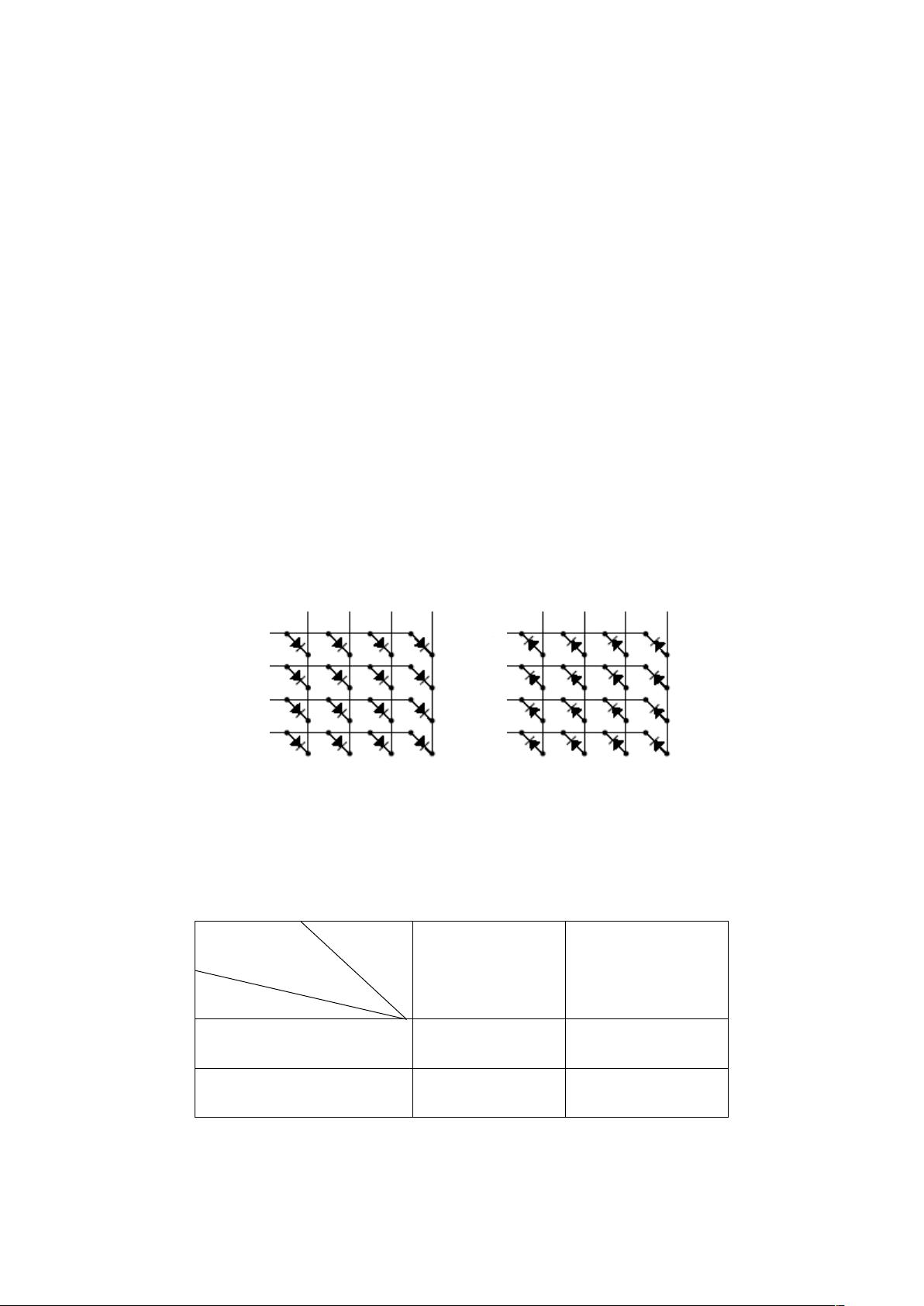
点阵 LED 有共阴和共阴两种结构。如果点阵 LED 的阴极接行线、阳极接
列线称为共阴点阵 LED;如果 LED 的阳极接行线、阴极接列线称为共阳点阵
LED,如图 1-1 所示。
Y
1
Y
2
Y
3
Y
4
Y
1
Y
2
Y
3
Y
4
X
1
X
2
X
3
X
4
X
1
X
2
X
3
X
4
(
a
)共阳结构
(
b
)共阴结构
图 1-1 点阵 LED 的两种结构
共阴点阵 LED 驱动电压见表 1-1,行电极寻址接低电平 V
1
,行电极非寻址
状态接高电平 V
2
;列电极有数据接高电平 V
2
,列电极无数据时接低电平 V
4
。
表 1-1 共阴点阵 LED 驱动电压
列电极
象素电压
行电极
数据
高电平 V
2
无数据
低电平 V
4
寻址
低电平 V
1
(全选)V
3
-V
1
发光
(行半选)V
4
-V
1
反偏截止
非寻址
高电平 V
2
(列半选)V
3
-V
2
反偏截止
(非选)V
4
-V
2
反偏截止
LED 在全选点状态大于 V
th
,而其它状态都小于 V
th
。
3、一个 5×7 共阴点阵 LED 字符显示
下载后可阅读完整内容,剩余8页未读,立即下载
186 浏览量
180 浏览量
2023-04-15 上传
167 浏览量

weixin_42460173
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 模糊综合评判方法(matlab).rar
- Python与网络爬虫.rar
- Minkowski-Bouligand-dimension:几何分形,ladimensiónde Minkowski-Bouligand,坦比亚梅特里科
- android-fragment-demo:演示片段在Android中的简单应用
- CodingChallenges
- opencv-contrib-3.4.0(完整版无需添加)
- 人物 地球 飞机 全球商务动态片头ppt模板.rar
- api-PayU:PayU的令人愉快的Api
- 基于栈的算术表达式求值算法.rar
- STM32cubeMX STM32F103c8T6 IIC双机通讯 从机程序
- blocbeginner
- evm:超轻量级物联网虚拟机
- JavaScript项目
- 极限学习机数据集.rar
- 获得磁盘可用空间 _getdrive(),_getdiskfree().zip
- Algorithms-Solutions:Google竞赛,LeetCode和HackerRank(Python占多数)的算法解决方案
