基于场景角点的2D激光雷达与相机外标定方法
需积分: 9 104 浏览量
更新于2024-09-07
收藏 2.12MB PDF 举报
本文主要探讨了2D激光测距仪(Laser-Range Finder, LRF)与相机的外在标定问题,即如何确定两者在三维空间中的相对位置关系。标题"Extrinsic Calibration of a 2D Laser-Range-finder and a Camera based on Scene Corners"表明研究者们采用了一种新颖的方法,这种方法依赖于人类制造环境中常见的场景角落作为标定特征,而非传统的特定图案如平面或V形图案。
通常,机器人设备为了实现更准确的空间感知和导航,会配备2D激光测距仪和摄像头,因为它们能互补彼此的不足。然而,正确融合来自这两种传感器的数据,即完成它们的外在标定,至关重要。作者提出的方法利用场景角落作为标定依据,这使得整个过程无需专门设计的图案,从而简化了操作流程,并加快了标定速度。
该方法的核心在于,通过观察场景中的正交三面体——这些在现实环境中广泛存在,研究人员可以同时应用线到平面和点到平面的约束,这相较于仅依赖平面或V形图案的先前方法,提供了更为丰富的配置,进而提高了标定精度。作者通过合成实验和实际应用验证了他们的方法,结果显示,相比于现有的先进技术,这种基于场景角落的外在标定法具有更好的性能表现。
具体实施时,首先,系统需要识别并定位场景中的角落点,这些点与激光测距仪和相机的测量数据之间建立了关联。然后,通过线段和面的几何关系,可以构建一系列方程组,用于求解相机和激光测距仪之间的旋转和平移参数。这种方法的优点在于其普适性和鲁棒性,即使在复杂或变化的环境中,也能有效地执行标定任务。
此外,由于文中强调了对精度的要求,实验结果应包括详细的误差分析,以及对比不同方法在精度、速度和鲁棒性方面的优势,以便为其他研究者提供有价值的参考。这篇论文提供了一种创新的、实用的2D激光测距仪和相机外在标定方法,对于机器人技术、自动化导航以及环境感知等领域有着重要的理论和实践价值。
Extrinsic Calibration of a 2D Laser-Rangefinder and a Camera based
on Scene Corners
Ruben Gomez-Ojeda, Jesus Briales, Eduardo Fernandez-Moral and Javier Gonzalez-Jimenez
Abstract— Robots are often equipped with 2D laser-
rangefinders (LRFs) and cameras since they complement well
to each other. In order to correctly combine measurements from
both sensors, it is required to know their relative pose, that is, to
solve their extrinsic calibration. In this paper we present a new
approach to such problem which relies on the observations of
orthogonal trihedrons which are profusely found as corners in
human-made scenarios. Thus, the method does not require any
specific pattern, which turns the calibration process fast and
simpler to perform. The estimated relative pose has proven
to be also very precise since it uses two different types of
constraints, line-to-plane and point-to-plane, as a result of a
richer configuration than previous proposals that relies on plane
or V-shaped patterns. Our approach is validated with synthetic
and real experiments, showing better performance than the
state-of-art methods.
I. INTRODUCTION
The combination of a laser-rangefinder (LRF) and a cam-
era is a common practice in mobile robotics. Some examples
are the acquisition of urban models [1] [2], the detection
of pedestrians [3], or the construction of semantic maps
[4]. In order to effectively exploit measurements from both
type of sensors, a precise estimation of their relative pose,
that is, their extrinsic calibration, is required. This paper
presents a method for such extrinsic calibration which relies
on the observation of three perpendicular planes (orthogonal
trihedron), which can be found in any structured scene, for
instance, buildings. This idea to calibrate the sensors from
the elements of the environment was inspired by our previous
work for RGB-D cameras [5] and LRFs [6]. In a nutshell, the
calibration process is performed by first extracting the three
plane normals from the projected junctions of the trihedron,
and then imposing co-planarity between the scanned points
and those planes.
A. Related Work
The most precise and effective strategy to perform the
extrinsic calibration between a camera and a LRF is by
establishing some kind of data association between the sensor
measurements. For that, the intuitive approach is to detect
the laser spot in the image, but this is rarely feasible since
most LRFs employ invisible light beams. Then, the common
The authors are with the Mapir Group of Department of System
Engineering and Automation, University of Málaga, Spain. +E-mail:
{rubengooj|jesusbriales}@gmail.com
This work has been supported by two projects: "GiraffPlus", funded by
EU under contract FP7-ICT-#288173, and "TAROTH: New developments
toward a robot at home", funded by the Spanish Government and the
"European Regional Development Fund ERDF" under contract DPI2011-
25483.
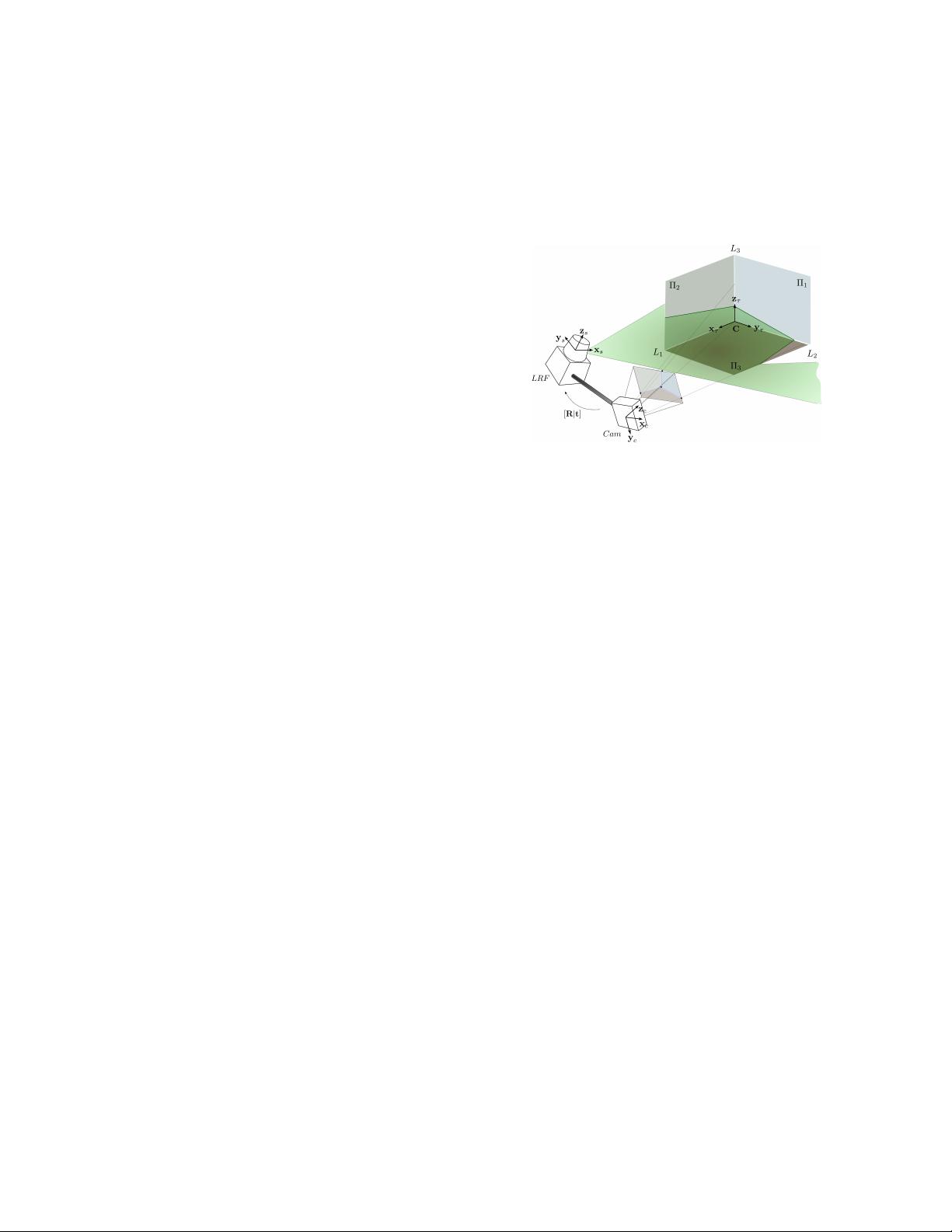
Fig. 1. Observation of a trihedron structure, which is defined by three
orthogonal planes {Π
1
, Π
2
, Π
3
} intersecting at three orthogonal lines
{L
1
, L
2
, L
3
}, by a rig formed by a 2D LRF and a camera.
practice is to establish geometric constraints from the asso-
ciation of different 3D features (e.g. points, lines and planes)
observed simultaneously by both sensors. Depending on the
nature of the detected features, two methodologies have been
considered in the literature. The first one employs point-to-
line restrictions, establishing correspondences between some
identifiable scanned points and line segments in the image.
A typical calibration target for this technique is the V-
shaped pattern proposed by Wasielewski and Strauss [7].
Their approach computes the intersection point of the LRF
scan plane with the V-shaped target, and then minimizes the
distance from the projected point to the line segment detected
in the image. In general, this procedure requires a large
number of observations to have a well-determined problem
and to reduce the error introduced by the mismatch between
the scan point and the observed line. To overcome this
limitation, in [8] the number of point-to-line correspondences
in each observation is increased to three by introducing
virtual end-points, and also the effect of outliers is lowered
down with a Huber weighting function.
A different strategy is the one proposed by Zhang and
Pless [9], which makes use of a planar checkerboard pattern.
Similarly to the camera calibration method in [10], they
first estimate the relative pose between the camera and the
pattern in each observation. Then, they impose point-to-
plane restrictions between the laser points and the pattern
plane to obtain a linear solution, which is employed as
initial value in a final non-linear optimization process. This
approach has two problems: the initial value may not be a
valid pose, since there is no guarantee that the rotation R ∈
SO(3), and it is often a poor guess which leads to a local
minimum. These disadvantages are addressed in [11], where
the authors reformulate the estimation as a linear Perspective
2015 IEEE International Conference on Robotics and Automation (ICRA)
Washington State Convention Center
Seattle, Washington, May 26-30, 2015
978-1-4799-6922-7/15/$31.00 ©2015 IEEE 3611
下载后可阅读完整内容,剩余5页未读,立即下载
2021-04-20 上传
2011-01-28 上传
2021-04-03 上传
2019-05-05 上传
2023-10-13 上传
2021-05-22 上传
2021-02-08 上传
2021-05-26 上传
2021-02-08 上传
2021-02-13 上传

alay_sjl
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
