分布式驱动电动汽车控制策略与软件开发研究
版权申诉
5 浏览量
更新于2024-07-02
1
收藏 17.67MB PDF 举报
"车辆控制器硬件在环仿真测试。通过实际道路测试和硬件在环仿真,验证了所设计的整车控制软件的性能和稳定性。在实验中,分布式驱动电动汽车在不同工况下的动力性和操控性得到了显著改善,证明了所提出的控制策略的有效性。
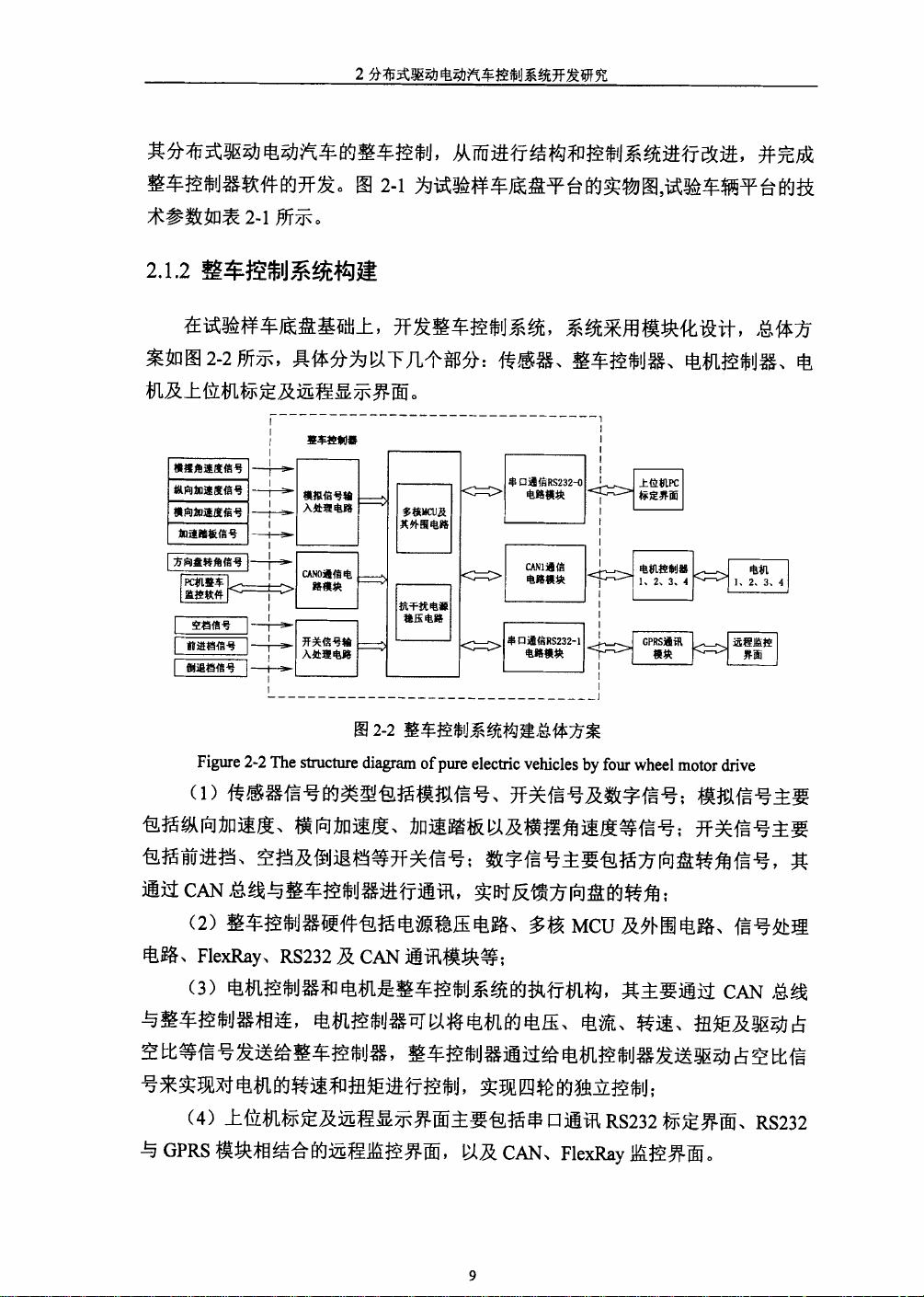
分布式驱动电动汽车是一种创新的驱动形式,它将电动机直接安装在车轮上,每个车轮由独立的电机驱动,从而实现了更高效的动力分配和精确的车辆动态控制。相比于传统的集中式驱动系统,分布式驱动提供了更高的能量利用率、更好的牵引性能以及更优的驾驶体验。
论文中提到的基于轮胎转速差的PI控制算法是用于调节车辆在加速、减速和巡航等不同工况下的动力分配。PI控制器结合比例和积分作用,可以有效地调节电机的扭矩输出,确保车辆在各种行驶条件下稳定运行。阿克曼差速转向控制算法则是为了实现车辆在转向时的精准路径跟踪,它基于理想转向理论,通过调整左右车轮的转速差来达到理想的转弯半径。
此外,文章探讨了V型开发模式在汽车电控单元中的应用,这是一种系统工程方法,强调了从需求分析到系统设计、再到验证的迭代过程。Matlab/Simulink工具的使用使得控制策略的建模和仿真变得更加便捷,而RTW工具则能够自动生成符合特定硬件平台的代码,大大提高了软件开发的效率。
通过DAVE完成的底层软件开发和Tasking软件的集成,实现了控制策略与硬件之间的无缝对接,保证了控制软件在实际硬件上的高效运行。这样的开发流程是现代汽车电子控制系统开发的典型实践,体现了理论研究与工程实践的紧密结合。
总结来说,这篇论文深入研究了分布式驱动电动汽车的控制策略,设计并实现了整车控制软件,通过严谨的开发流程和详尽的测试验证,展示了其在提高电动汽车性能和驾驶安全方面的显著效果。这项工作对于推动分布式驱动电动汽车技术的发展和应用具有重要的理论和实践价值。"
万方数据
剩余92页未读,继续阅读
2021-09-04 上传
2021-08-08 上传
2021-08-08 上传
2024-03-11 上传
2023-07-20 上传
2024-03-11 上传
2023-05-05 上传
2024-01-28 上传
2024-03-11 上传

programmh
- 粉丝: 4
- 资源: 2162
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言快速排序算法的实现与应用
- KityFormula 编辑器压缩包功能解析
- 离线搭建Kubernetes 1.17.0集群教程与资源包分享
- Java毕业设计教学平台完整教程与源码
- 综合数据集汇总:浏览记录与市场研究分析
- STM32智能家居控制系统:创新设计与无线通讯
- 深入浅出C++20标准:四大新特性解析
- Real-ESRGAN: 开源项目提升图像超分辨率技术
- 植物大战僵尸杂交版v2.0.88:新元素新挑战
- 掌握数据分析核心模型,预测未来不是梦
- Android平台蓝牙HC-06/08模块数据交互技巧
- Python源码分享:计算100至200之间的所有素数
- 免费视频修复利器:Digital Video Repair
- Chrome浏览器新版本Adblock Plus插件发布
- GifSplitter:Linux下GIF转BMP的核心工具
- Vue.js开发教程:全面学习资源指南
