目标检测:从R-CNN到YOLO的理解与改进
122 浏览量
更新于2024-08-29
4
收藏 1.58MB PDF 举报
"本文深入探讨了目标检测领域的经典算法,特别是Yolo系列之前的R-CNN家族,包括R-CNN、Fast R-CNN和Faster R-CNN。文章详细阐述了R-CNN的基本结构和工作原理,指出其存在的问题并介绍了改进方法,如SPP和ROI池化。此外,还简要提及了Fast R-CNN和Faster R-CNN对R-CNN的优化策略。"
在计算机视觉领域,目标检测是一项关键任务,它涉及到识别图像中物体的位置并确定它们的类别。在Yolo(You Only Look Once)系列算法出现之前,R-CNN(Regions with Convolutional Neural Networks)是主导的解决方案。R-CNN由两个主要步骤组成:候选区域提取和候选区域分类。候选区域通过选择性搜索技术产生,接着通过SVM或CNN进行分类。然而,R-CNN的缺点在于计算效率低,因为它需要对每个候选区域单独进行前向传播。
为了提高效率,研究人员引入了空间金字塔池化(SPP)和region of interest(ROI)池化。SPP允许固定大小的特征输出,即使输入大小不一,而ROI池化则在不同尺度的特征图上对候选区域进行池化,减少了计算量。这些改进催生了Fast R-CNN,它将候选区提取和分类集成到一个网络中,使用ROIPooling并引入Smooth L1损失函数以改善模型稳定性和训练效率。
尽管Fast R-CNN显著提高了速度,但仍然存在候选区提取的瓶颈。Faster R-CNN进一步优化,通过引入区域提议网络(Region Proposal Network,RPN)直接在卷积特征图上生成候选区域,实现了端到端的训练,大大提升了目标检测的速度和准确性。
R-CNN系列的发展历程反映了目标检测算法的进步,从最初的分步方法到后来的更高效、更集成的解决方案。这些技术的进步为后续的Yolo系列算法铺平了道路,Yolo通过单次前传就能完成目标检测,大大提高了实时性,同时保持了较高的检测精度。
目标检测算法之目标检测算法之Yolo系列系列
引入
目标检测算法是计算机视觉三大基础任务之一,其包括目标定位和目标分类两部分。
在 yolo 系列出来之前,主流的做法是分段式的 R-CNN 系列,主要包括 R-CNN、Fast R-CNN、Faster R-CNN、Mask R-
CNN 等。
R-CNN 基本结构和原理
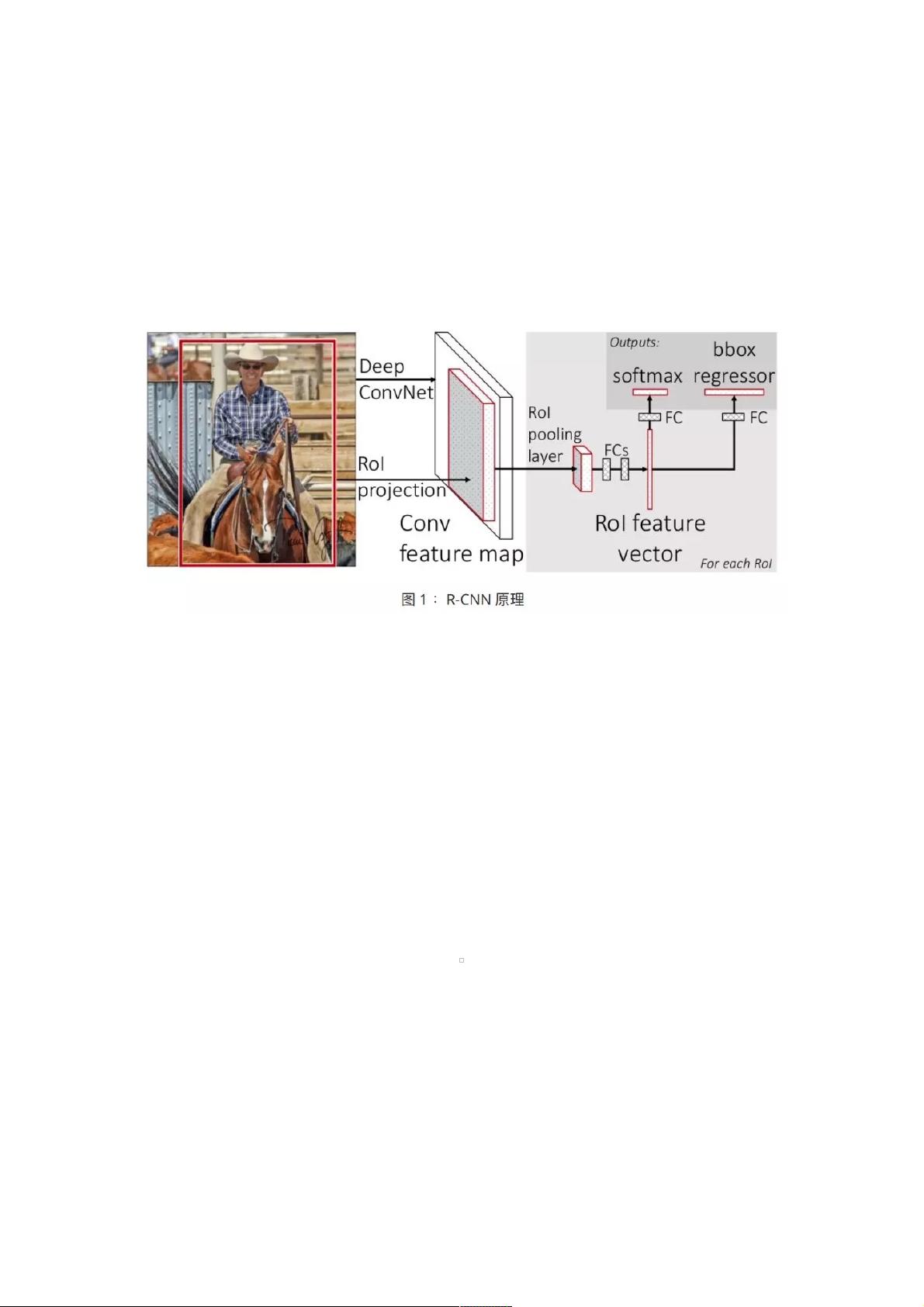
R-CNN 的基本结构如下图所示:
R-CNN 主要分为候选区提取和候选区分类两个阶段,并且两阶段分开训练。其主要思想如下。
首先通过选择性搜索(Selective Search)对输入进行超像素合并,产生基础的子区域。然后将小的子区域不断合并成大区
域,并从中找出可能存在物体的区域,这个过程即候选区提取(Region Proposal)。
提取出包含目标的候选区之后,需要对其进行分类,判定目标属于哪一类。可以通过 SVM 或 CNN 等算法进行分类。
R-CNN 的不足与改进
SPP 和 ROI
要实现较为实用的 R-CNN 网络,往往需要对输入样张提取上千个候选区,并对每个候选区进行一次分类运算。于是,后续出
现空间金字塔池化(SPP) 和 region of interest(`ROI)等方式进行改进。
其基本思想是,输入图片中的目标区域,经过 CNN 后,得到的特征图中,往往也存在着对应的目标区域,此即 ROI。后续对
该特征图(多种尺度)上的 ROI 进行分类,此即 SPP。
通过这种方式,可以共用特征提取部分,只对最后的特征图进行候选区提取和分类。这样就可以极大地减少总的计算量,并提
升性能。
Fast R-CNN
但是,SPP 和 ROI 方式,仍旧需要分段训练。其不仅麻烦,同时还分割了 bounding box 回归训练与分类网络的训练。这使
得整个函数的优化过程不一致,从而限制了更高精度的可能。
于是,再次对其进行改进:
1.进行 ROI 特征提取之后,将两种损失进行合并,统一训练。这样相对易于训练,且效率更高
2.将 SPP 换做 ROI Pooling
3.对于 bounding box 部分的 loss,使用 Smooth l1 函数,可以提升稳定性
Faster R-CNN
在 Fast R-CNN 中,对 ROI 而非原图的候选区进行分类,提升速度。因此,下一步可以对候选区提取部分进行优化,提升性
能。
下载后可阅读完整内容,剩余9页未读,立即下载
604 浏览量
219 浏览量
2024-05-05 上传
2024-11-30 上传
2322 浏览量
2024-12-10 上传

weixin_38675815
- 粉丝: 3
- 资源: 888
 我的内容管理
展开
我的内容管理
展开







