KUKA C2 Devicenet配置详解:弧焊软件与DeviceNet驱动步骤
需积分: 48 37 浏览量
更新于2024-07-17
2
收藏 4.26MB DOCX 举报
本资源主要介绍了库卡(KUKA)机器人C2 Devicenet的配置步骤,针对的是与KUKA机器人(如KRC2控制柜)之间的通信。首先,确保弧焊软件包ArcTechAnalog已安装,这是进行后续配置的基础。如果未安装,需通过"准备运行—安装附加软件"进行安装。
配置的关键步骤包括:
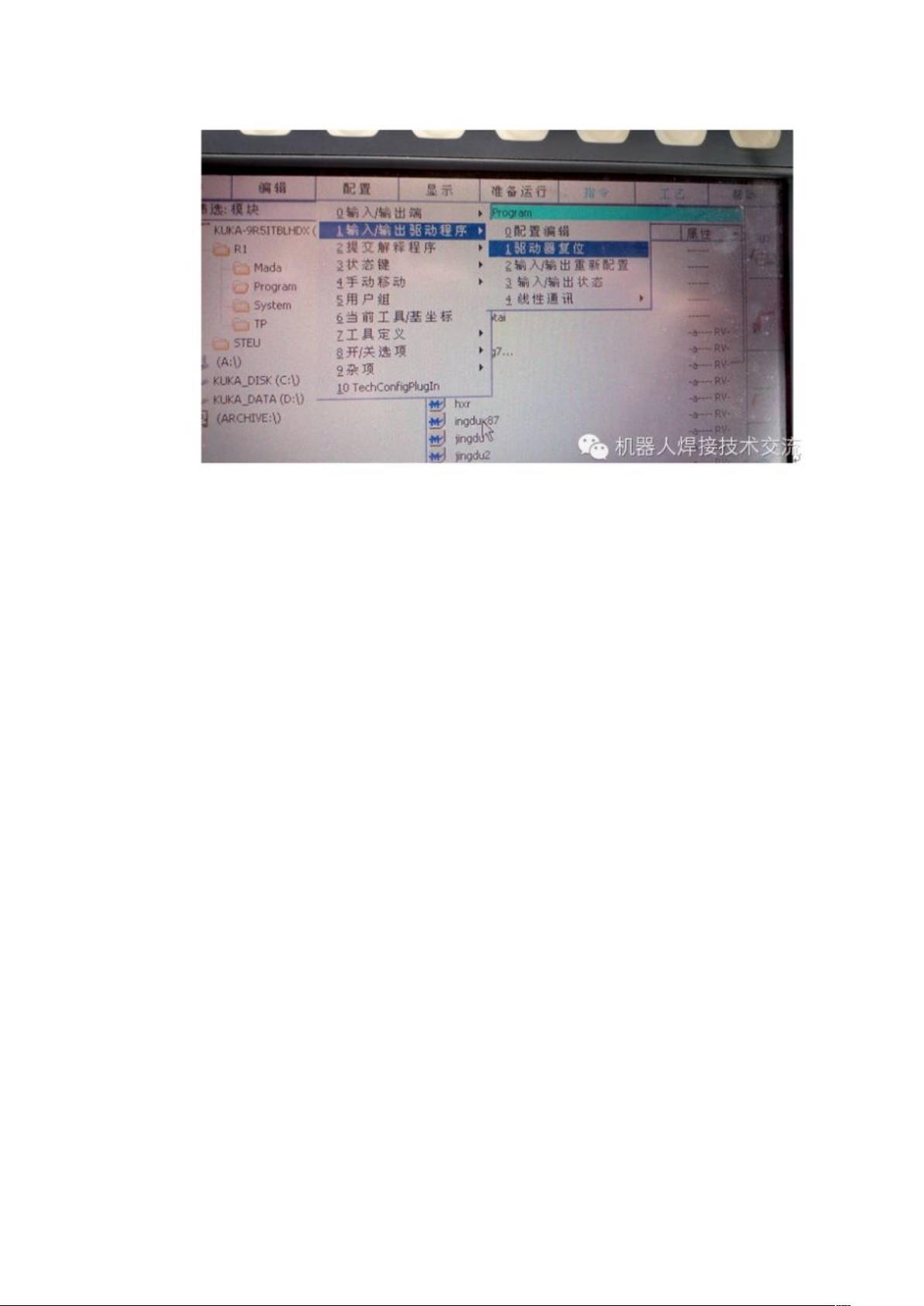
1. 检查DeviceNet驱动:
- 在专家模式下,进入配置选项,检查输入/输出驱动程序是否已安装。如果没有安装,系统会提示"驱动程序没安装!",这时需要安装DeviceNet驱动。
- 安装驱动时,会显示特定界面,并且左下角有"配置"软按键,用于引导下一步操作。
2. 设定通讯地址:
- 确保软件和驱动安装完成后,机器人作为主站,通讯地址设为0,焊机和WAGO模块为从站,通常焊机地址为5,WAGO地址为10,遵循公司规定。
3. IO配置:
- 进入IO配置阶段,首先需要将DeviceNet设置为有效。然后,修改`[DEVNET]`区域的配置,去除";DEVNET=2,dnInit,dn2drv.0"前的分号。
- 接下来,操作`config.dat`文件,通过折叠功能定位到相关的ArcTechOutputs部分,按照提供的图形配置指定的语句。
4. SPS文件配置:
- 在R1/System/sps文件夹中,打开`sps.sub`文件,找到USERPLC部分,折叠展开并根据需要配置相应的语句,这部分涉及到用户编程逻辑的配置。
这个文档详细地指导了如何在KUKA C2控制系统中设置DeviceNet连接,包括软件检查、驱动安装、通讯地址的设定以及输入输出接口的配置,这对于理解和操作KUKA机器人及其周边设备的通信至关重要。在实际操作时,请务必按照文档中的步骤和注意事项进行,以确保通信的稳定和有效。
上图的右下角软按键“配置”,单击进入下面的画面
剩余15页未读,继续阅读
2022-07-12 上传

weixin_39229346
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- another-round:另一轮琐事游戏
- RabbitMQ-Demo.zip
- Story-app-2:故事应用
- c-simple-libs:简单,干净,仅标头,C库
- SoftEngG1B:软件工程项目
- 水晶动物图标下载
- 可执行剑:关于剑的游戏
- monke-lang:德蒙克的威
- 虎皮鹦鹉图标下载
- Django_Personal_Portfolio:使用Django制作的投资组合网站
- hassant5577.github.io
- shaarlo:统一Shaarlis Rss
- 4boostpag
- Công Cụ Đặt Hàng Của Express-crx插件
- 米老鼠图标下载
- AdaptableApp:CITRIS 应用程序竞赛
