六自由度机械臂轨迹规划与仿真技术研究
"这篇研究论文主要探讨了六自由度机械臂的轨迹规划与仿真技术,旨在解决在正运动学、逆运动学及轨迹规划仿真过程中验证算法正确性和评估规划效果的困难。作者通过建立准确的机械臂数学模型,分析了关节空间中的两种轨迹规划方法,并开发了一款基于VC++6.0和MFC框架的三维仿真软件来验证这些方法。该软件利用OpenGL图形库构建机械臂模型,并结合正、逆运动学算法进行仿真。通过对比三次多项式和五次多项式两种轨迹规划方法,结果显示五次多项式方法在轨迹规划上表现出更优的效果。关键词包括机械臂、运动学分析、轨迹规划和运动仿真。"
这篇研究的主要知识点包括:
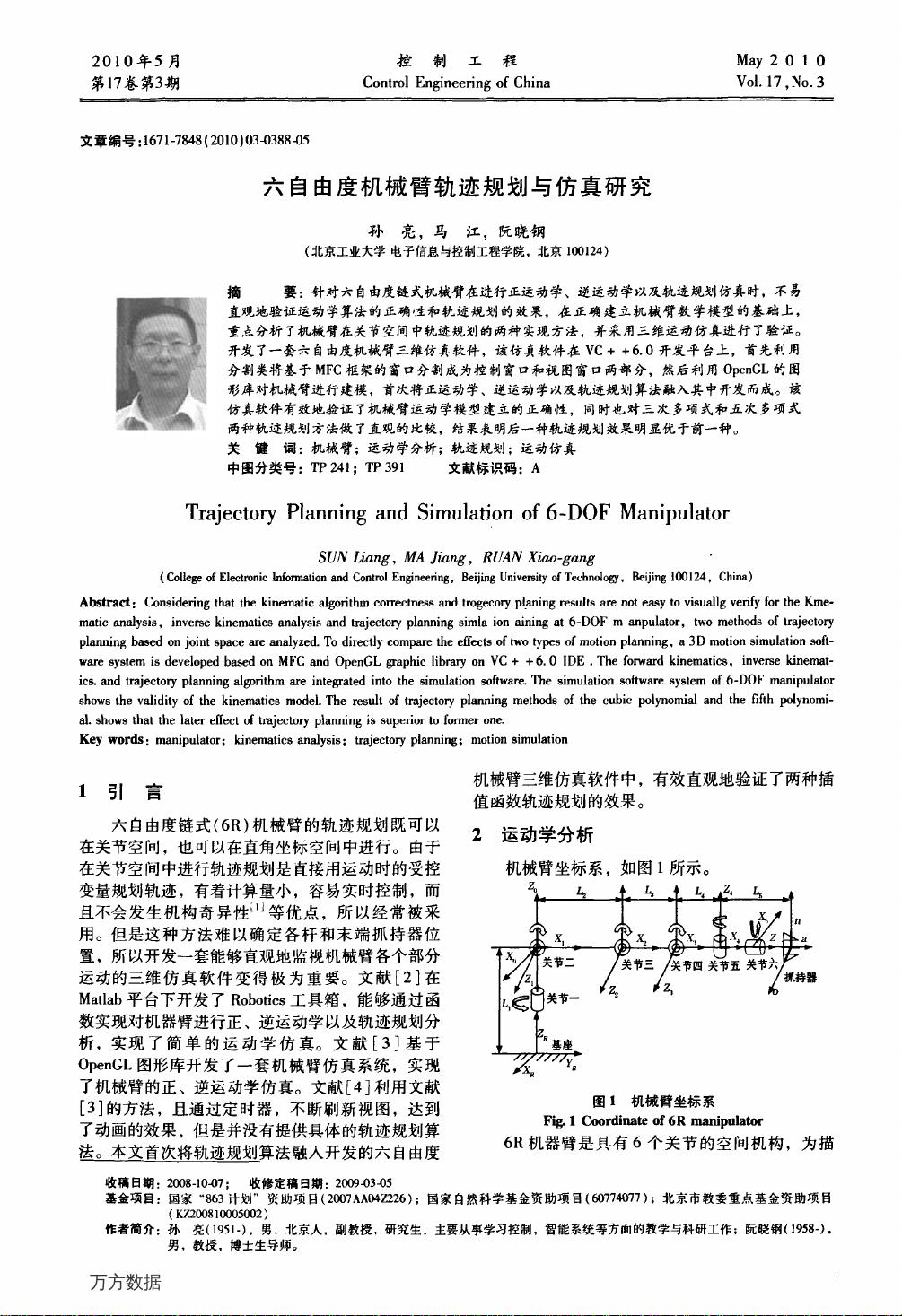
1. 六自由度机械臂:这种机械臂具有六个独立的关节,能够实现复杂的空间运动,广泛应用于工业自动化、机器人等领域。
2. 正运动学:研究从关节变量到末端执行器位置和姿态的映射,即确定机械臂各个关节角度与手部位置的关系。
3. 逆运动学:与正运动学相反,它解决的是给定末端执行器的位置和姿态,如何计算出各个关节所需的角度。
4. 轨迹规划:在机械臂操作中,规划其从起始位置到目标位置的平滑、安全路径,避免碰撞和动态约束。
5. 联合空间轨迹规划:在关节空间内进行规划,通常涉及多项式插值等方法,以生成连续且无碰撞的关节运动轨迹。
6. 三维运动仿真:通过计算机模拟机械臂的运动,提供视觉反馈,有助于验证运动学算法和轨迹规划的有效性。
7. VC++6.0和MFC框架:开发仿真软件的编程环境,MFC(Microsoft Foundation Classes)是微软提供的C++类库,用于简化Windows应用程序开发。
8. OpenGL图形库:用于在软件中创建和渲染3D图形,帮助构建机械臂的可视化模型。
9. 分割类与窗口管理:在软件设计中,通过分割类将用户界面分为控制窗口和视图窗口,便于交互和显示。
10. 三次多项式与五次多项式规划方法:两种不同的轨迹规划算法,五次多项式通常能提供更平滑的轨迹,但计算复杂度更高。
11. 文献标识码与中图分类号:文献标识码A代表理论与应用研究,中图分类号TP241表示自动控制技术,TP391代表计算机软件及计算机应用。
通过这篇研究,读者可以了解到六自由度机械臂轨迹规划的关键技术和仿真验证方法,以及如何利用软件工具进行运动学分析和比较不同规划策略的性能。这对于机械臂控制系统的开发和优化具有重要意义。
万方数据
下载后可阅读完整内容,剩余5页未读,立即下载
2018-11-21 上传
2023-07-10 上传
2024-01-15 上传
2023-05-20 上传
2023-06-12 上传
2023-05-14 上传
2023-06-11 上传

gao_cm
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- ExtJS 2.0 入门教程与开发指南
- 基于TMS320F2812的能量回馈调速系统设计
- SIP协议详解:RFC3261与即时消息RFC3428
- DM642与CMOS图像传感器接口设计与实现
- Windows Embedded CE6.0安装与开发环境搭建指南
- Eclipse插件开发入门与实践指南
- IEEE 802.16-2004标准详解:固定无线宽带WiMax技术
- AIX平台上的数据库性能优化实战
- ESXi 4.1全面配置教程:从网络到安全与实用工具详解
- VMware ESXi Installable与vCenter Server 4.1 安装步骤详解
- TI MSP430超低功耗单片机选型与应用指南
- DOS环境下的DEBUG调试工具详细指南
- VMware vCenter Converter 4.2 安装与管理实战指南
- HP QTP与QC结合构建业务组件自动化测试框架
- JsEclipse安装配置全攻略
- Daubechies小波构造及MATLAB实现
