ABB机器人操作手册:校准与准备工作详解
需积分: 31 142 浏览量
更新于2024-07-19
1
收藏 5.99MB PDF 举报
本篇文档是ABB操作手册,专注于Calibration Pendulum(校准摆锤)的校准流程和技术指导。手册适用于IRC5系列的ABB机器人,旨在帮助操作员理解和执行正确的校准步骤,确保机器人的精确度和性能。
1. 适用范围与时机:
- 本手册详细说明了校准的适用范围,包括哪些型号的机器人需进行校准,以及在新设备安装、更换关键部件或长时间未使用后需要重新校准的情况。
2. 校准类型与范围:
- 提供了不同类型的校准,如常规校准、特殊环境下的校准,以及针对特定轴位和传感器安装位置的调整。强调了校准的必要性和正确轴位置的重要性。
3. 设备准备:
- 手册涵盖了准备工作的详细介绍,如启动Levelmeter 2000设备,校准传感器和校准摆锤的操作方法,以及传感器的检查过程。
4. 校准服务流程:
- 定义了校准服务的例行程序,包括使用Calibration Pendulum II进行校准的具体步骤,如设备设置、各轴的校准顺序、更新转数计数器,以及对FlexPendant的配置。
5. 安全与责任声明:
- 提醒用户,本手册提供的信息如有变动,不会提前通知,且不构成对产品性能的承诺。同时,ABB对因使用手册导致的意外或间接损害不负责任,并强调未经书面许可不得复制或再生手册内容。
6. 语言与获取:
- 原始手册是英文版,其他语言版本是翻译版,用户可以从ABB官方获取额外的副本或语言支持。
这篇ABB操作手册是机器人操作员的重要参考资料,提供了详尽的校准步骤和注意事项,确保操作人员能够按照规程进行,从而提高机器人系统的可靠性和精度。在实际操作中,应严格遵循手册中的指导,以保证机器人系统的最佳性能。
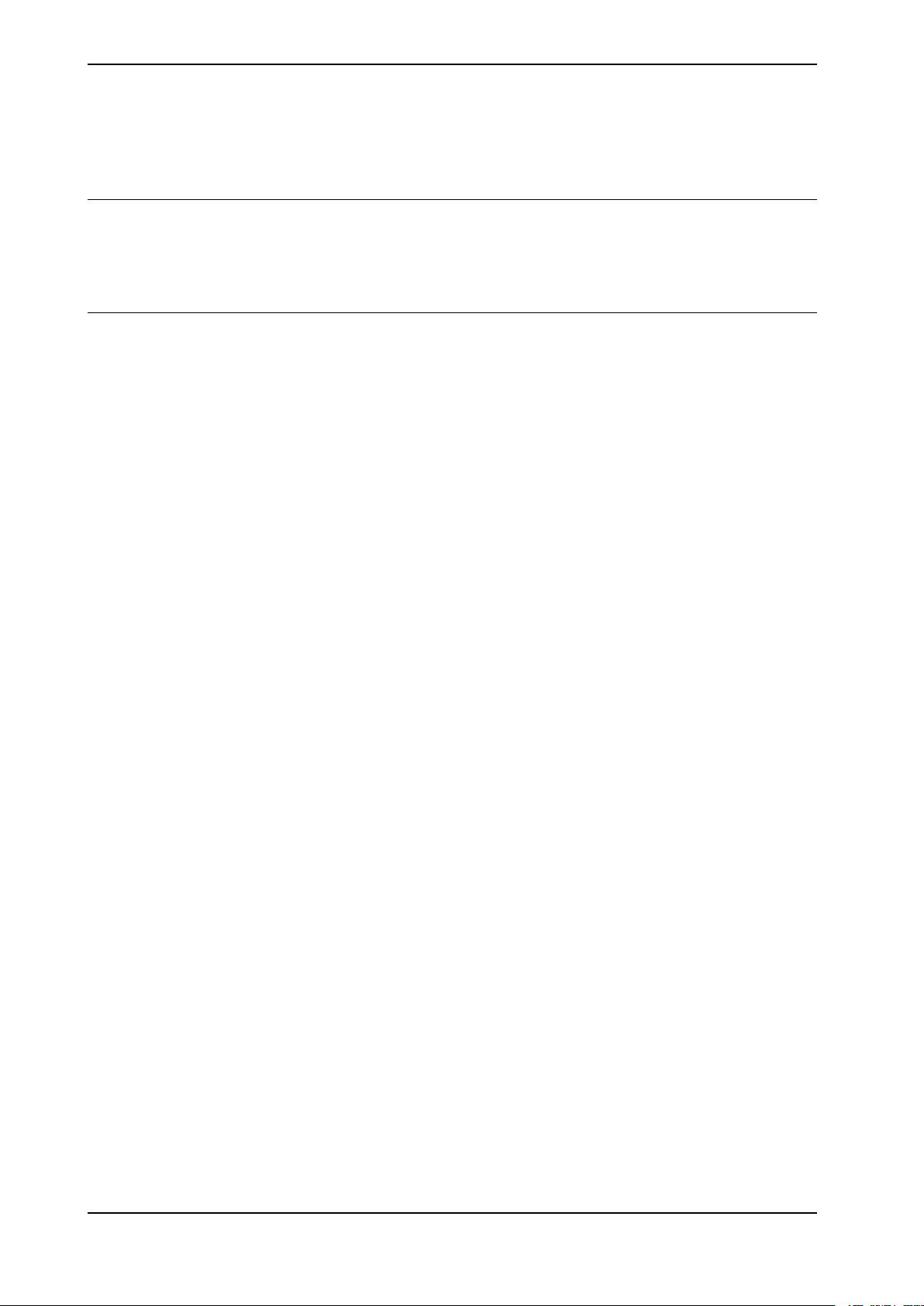
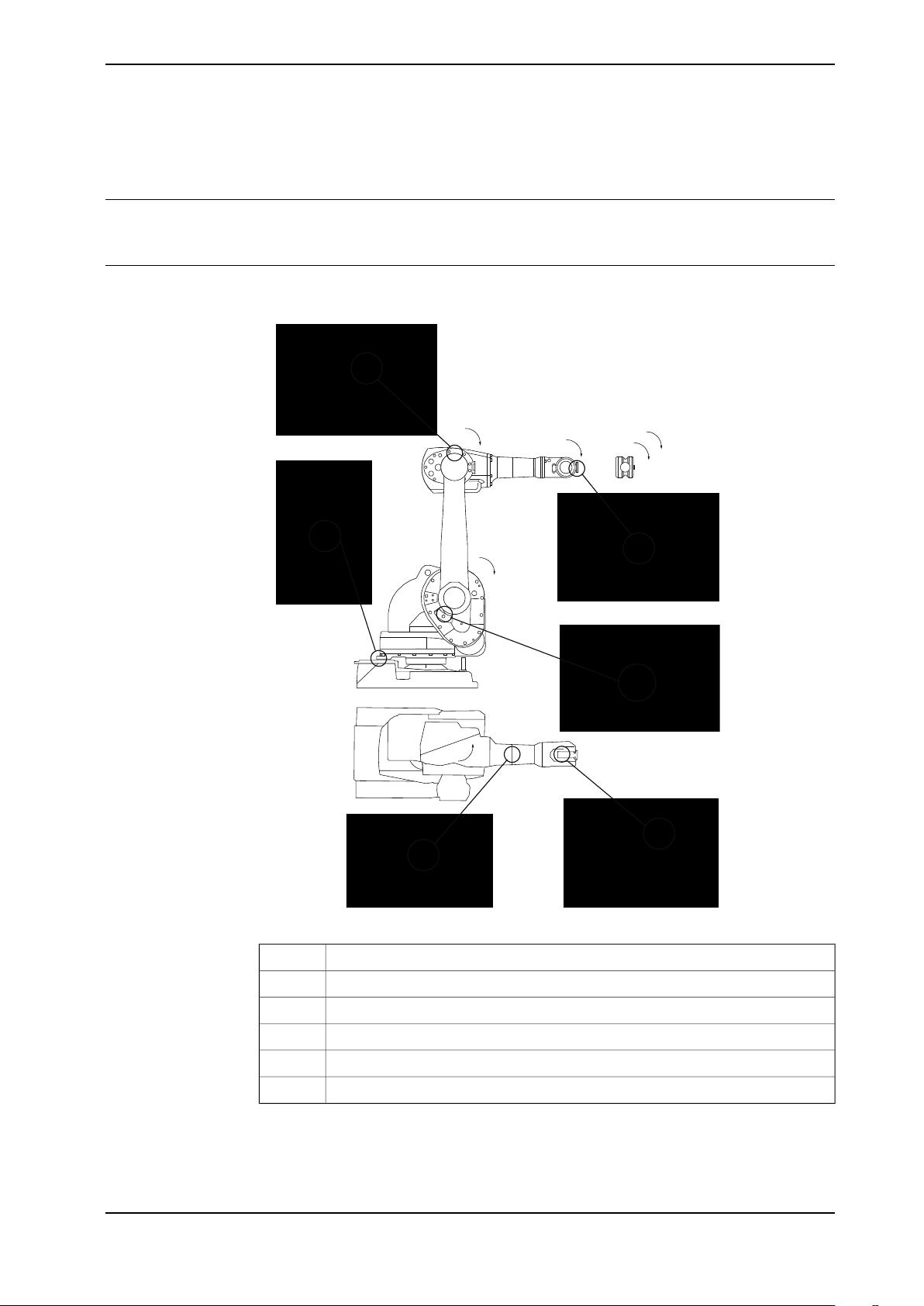
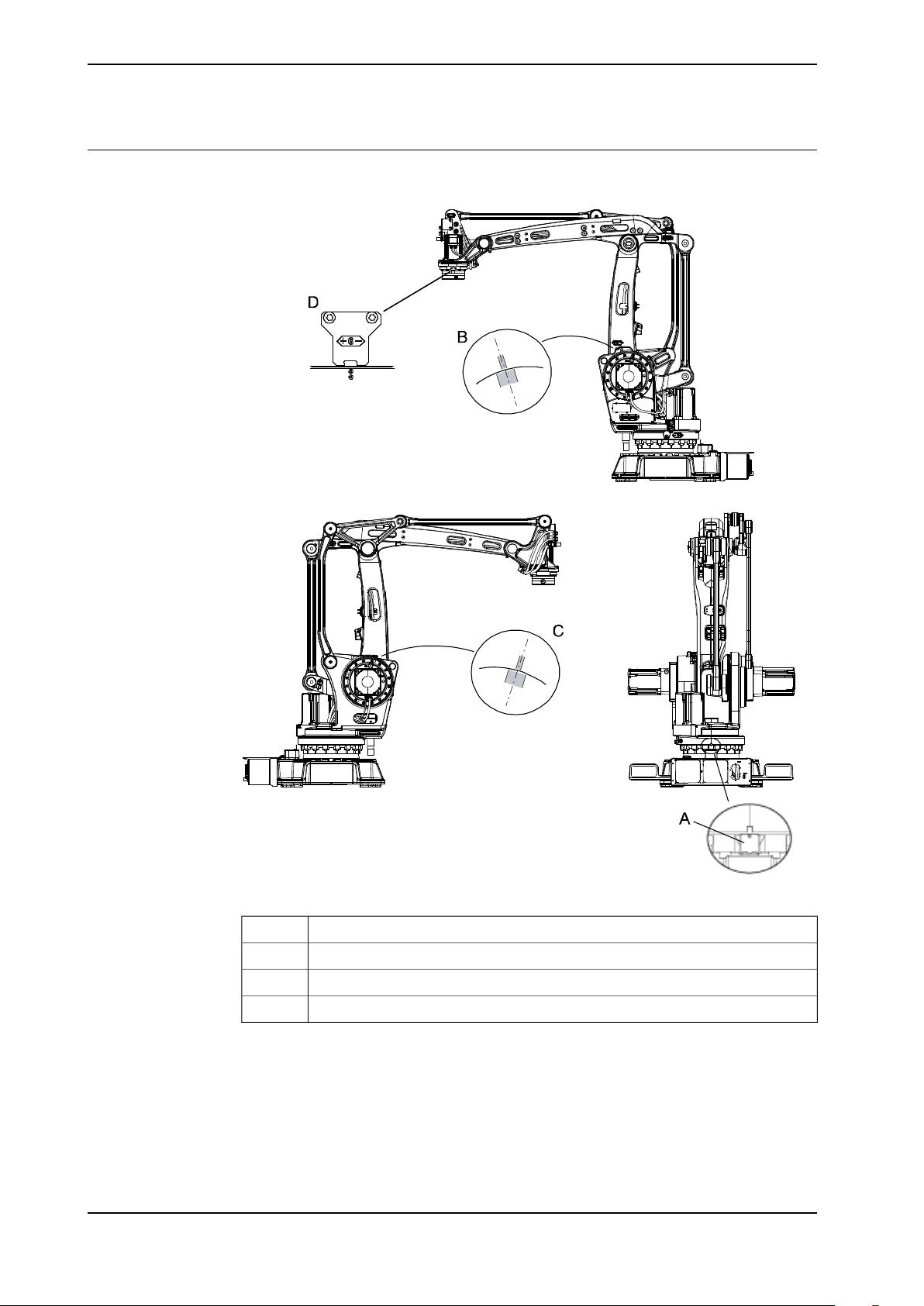
1.4 校准类型
Calibration Pendulum II(机器人原位校准)
使用 Calibration Pendulum II (CalPend) 例行程序将机器人移至零位置,以微校电机
校准偏移值。校准是全自动进行的,会将机器人移至从传感器读取的位置。
请参阅第60页的关于 Calibration Pendulum II。
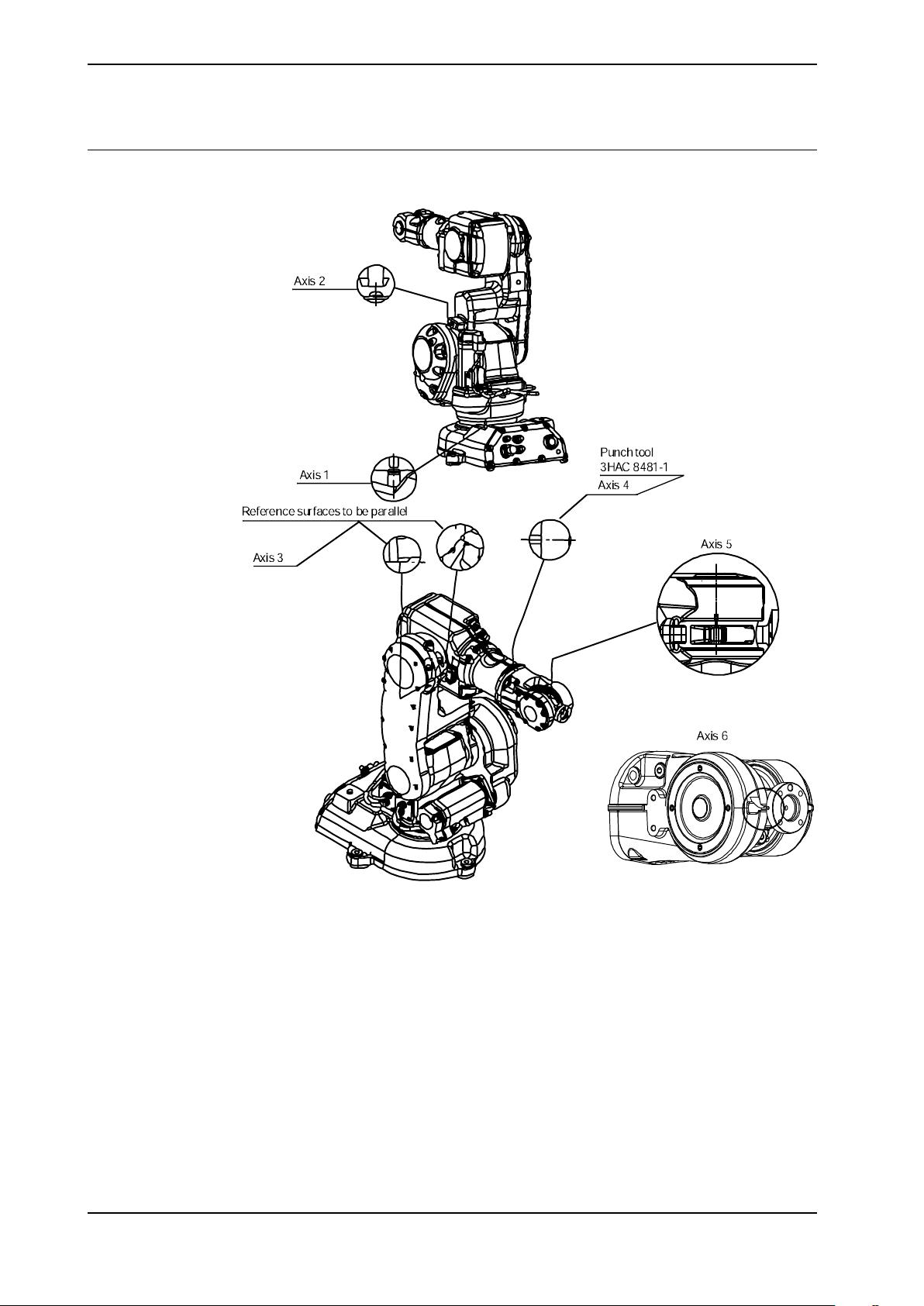
Reference Calibration
有了例行程序Reference Calibration (RefCal),一旦安装机器人,参考将采用机器人
的零位置。如果将来需要重新校准机器人,即需要重新校准电机校准偏移值时,将使
用这些参考值。请参阅第118页的关于Reference Calibration。
Reference Calibration具有下列特点:
• 轴 1 的位置:可将轴 1 放在任何位置,以避开障碍。(不适用于 Calibration
Pendulum II。)
• 工具和处理设备:所有在校准期间可以保持装配状态的工具和处理设备。(不
适用于 Calibration Pendulum II。)
• 悬挂机器人:也可对悬挂机器人使用参考。
16 操作员手册 - Calibration Pendulum
3HAC16578-10 修订: P
© 版权所有 2003-2007,2010-2015 ABB。保留所有权利。
1 校准简介
1.4 校准类型
剩余127页未读,继续阅读
2017-06-04 上传
2023-11-10 上传
2023-07-20 上传
2023-08-11 上传
2023-05-08 上传
2023-07-03 上传
2023-09-06 上传

weixin_39897884
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
