MATLAB预测控制工具箱:伺服系统设计与约束分析
版权申诉
149 浏览量
更新于2024-07-03
收藏 695KB DOC 举报
"matlab预测控制工具箱用于设计和分析预测控制策略,如伺服系统控制器的设计。文档中包含一个伺服系统控制器的设计示例,通过MATLAB建立状态方程模型,并设置了控制目标与约束条件。"
在MATLAB中,预测控制工具箱提供了一套强大的功能,用于开发和实施预测控制算法。预测控制是一种先进的控制策略,它基于对未来过程行为的预测来制定控制决策。在本示例中,我们关注的是一个位置伺服系统,该系统由直流电机、变速箱、弹性轴和负载组成。
1. **伺服系统控制器的设计**
- **数学模型**:伺服系统的动态行为可以通过一组微分方程来描述,这些方程反映了系统的物理特性。在本例中,状态方程被表示为一组线性常微分方程,包含了电机、弹性轴和负载的参数。这些参数包括转动惯量、摩擦系数、电机常数等。
2. **控制目标与约束**
- **控制目标**:设计的目标是通过调整输入电压V,使过载角位置跟踪预设的参考值。在这个过程中,输出位置是可测量的,而输出力矩则是不可测量的。
- **约束条件**:为了保护系统,对输出力矩T和输入电压V都有约束。例如,力矩不能超过一定的强度限制,而电压也有其允许的最大值。
3. **在MATLAB中定义状态空间模型**
- 在MATLAB中,可以使用`mpcmotormodel`函数或直接编写命令来定义系统的状态空间模型。这涉及到将上述微分方程转换为矩阵形式,即状态空间表达式。在这个例子中,状态变量包括电机的位置、速度等,而输入和输出则对应于电压V和力矩T。
4. **参数设置**
- 文档中列举了各种参数,如轴的长度、直径、材料密度、刚度模量、剪切强度、电机和负载的质量、转动惯量、摩擦系数、电阻、电机常数和齿轮比等。这些参数是构建状态方程的关键,也是模拟和控制设计的基础。
通过MATLAB预测控制工具箱,用户可以实现对这种伺服系统的模型预测控制(MPC),优化控制性能并满足约束条件。MPC通常涉及在线解决一个有限时间优化问题,以最小化某个性能指标(如跟踪误差)同时确保系统约束得到满足。这个工具箱支持不同的预测控制算法,如线性二次型预测控制(LQGPC)、多步预测控制以及自适应预测控制等。
在实际应用中,MATLAB的预测控制工具箱可以帮助工程师快速原型设计,进行仿真测试,并最终部署到硬件系统中。结合Simulink环境,用户还可以可视化整个控制系统的运行情况,从而进一步优化控制策略。
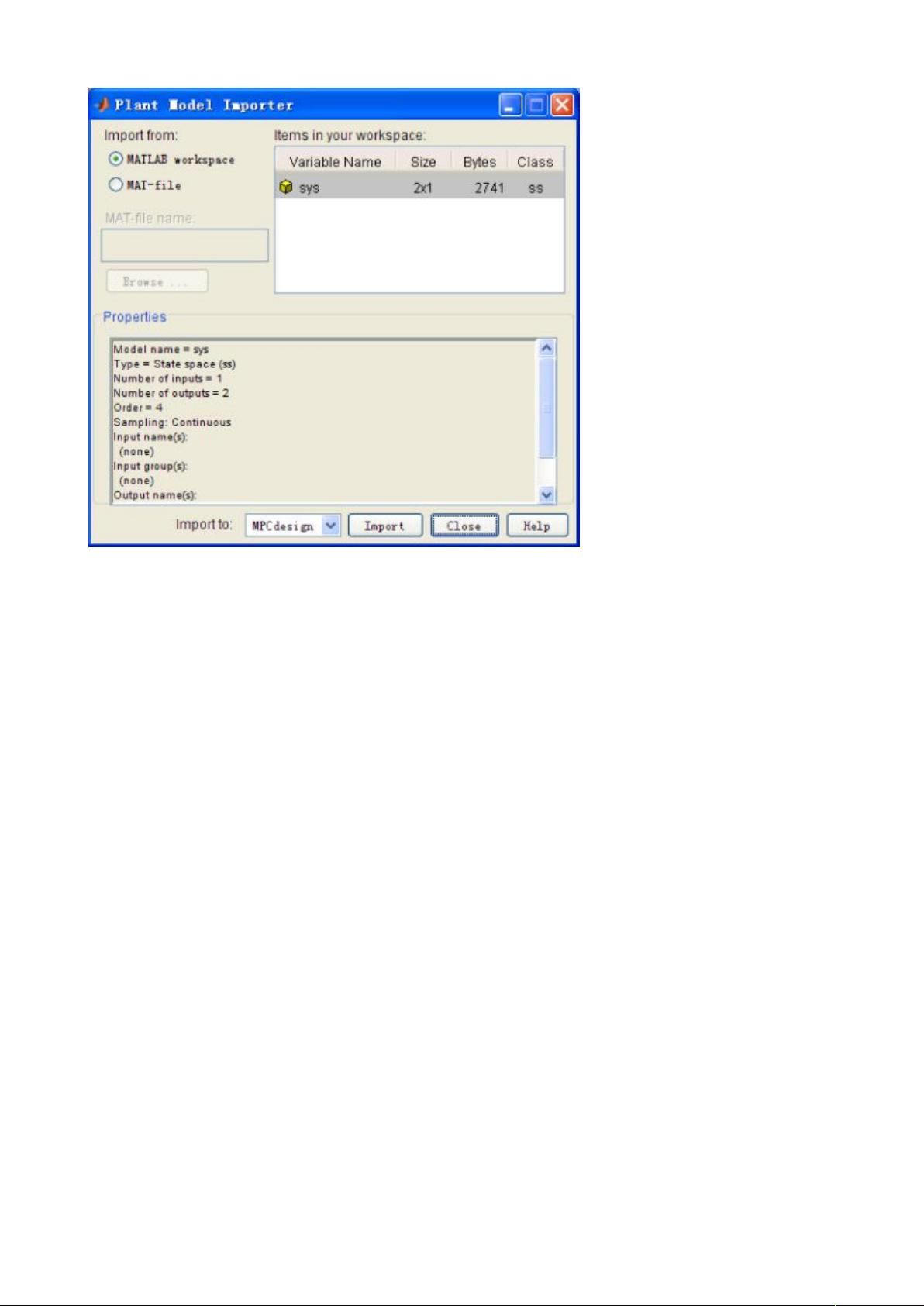
图 4-2 Import Dialog Box with the Servomechanism Model Selected
此时先前定义的伺服系统数学模型 sys 默认被选中,Properties 列出了该模型的主要属性。
点击 Import ,导入数学模型,见 4-3 所示。
第二步:设置属性
系统的数学模型导入后,需要对输入变量和输出变量的属性做一些修改,使之符合实际
情况。默认情况下,输入变量类型均是 manipulated ,本例中不需要修改。默认输出变量类
型是 measured ,本例的两个输出变量中,可测量,T 不可测量,需要相应修改。
4
5 可以修改输入变量和输出变量的名称,增加描述性内容,设置单位和初始值。此处将
In1,Out1,Out2 修改为 V ,ThetaL,T ,其它修改见图 4-3。
剩余28页未读,继续阅读
点击了解资源详情
119 浏览量
点击了解资源详情
2021-09-18 上传
518 浏览量
122 浏览量
225 浏览量
2024-10-26 上传

智慧安全方案
- 粉丝: 3852
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网络电视压缩包内容解析
- Verilog实现贪吃蛇游戏的FPGA源码解析
- iOS PanCardView动画拖动效果实现教程
- Eclipse插件spket-1.6.23实现JS和JQuery代码提示功能
- Angular自定义组合框指令及模糊搜索功能介绍
- C#实现Textbox智能提示功能指南
- STM32MP157单通道ADC采集DMA读取HAL库驱动程序
- 将Woz的SWEET16 16位处理器移植至C64的Kick汇编程序
- MATLAB时频分析工具箱TFTB-0.2使用教程
- Netty实例5.0:全面解析IO通信框架及其应用
- 基于51单片机的16按键计算器设计与实现
- iOS开发中MBProgressHUD网络加载视图的应用
- STM32MP157 HAL库驱动PCF8563实时时钟程序教程
- 淘宝卖家不可或缺的钻展教程指南
- librender渲染器: C++实现的单对象渲染技术
- 安卓设备USB驱动安装与更新教程
