三菱PLC伺服控制程序详解与故障处理
版权申诉
"该文档详细介绍了三菱PLC控制伺服电机的经典程序设计方法,包括原点回归、速度调整以及错误复位等关键步骤。"
在工业自动化领域,三菱PLC是广泛应用的控制器,常用于控制伺服电机实现精确的位置、速度和力矩控制。本资料主要涉及以下五个知识点:
1. **原点回归程序**:
- 原点回归启动通常由M代码触发,如M1250,同时配合Y50等伺服参数设置。
- M6401是原点回归启动条件输出脉冲,T0H4K1500K9001K1是原点回归专用指令,其中T0指定了PLC到QD75模块的数据传输,H4、K1500、K9001分别为伺服模块地址、定位指令和机械原点回归设定。
- Y50、Y44、Y40分别代表定位启动、轴停止和PLC准备完成的输出,确保伺服电机安全地进行原点回归。
- M1081和M6501则用于监控电机状态和原点回归动作的完成。
2. **原点回归过程**:
- 在原点回归进行中,Y50保持接通,表示定位启动,X50和X4C监测电机状态,当X4C接通时,表示电机处于忙轴状态。
- 完成原点回归后,M6501持续接通,表示动作完成,而M6701和X48则用于检测伺服错误和电源中断,RSTY50用于电机复位。
3. **全部原点回归程序**:
- M1290启动原点回归,M1001确保在手动模式下进行,M100输出维持处理的原点回归信号。
- 断开条件包括M101全部原点回归完成、M1012复位键启动和M105紧急停止,所有电机的原点完成输出通过特定状态指示。
4. **JOG速度更改**:
- 通过M1055、M1053和M1051的按键开关选择高速、中速或低速JOG。
- SM400保持接通允许随时更改速度设定,D120存储速度值,DTOH4K1518D120K1指令用于将D120中的速度值写入伺服参数。
5. **错误复位**:
- 当发生SERVOERROR时,K1502、K1602、K1702、K1802是针对不同轴的专用复位代码,可用于清除错误状态。
这些程序设计方法和指令对于电气工程师来说非常重要,能够帮助他们更好地理解和调试三菱PLC控制伺服系统的应用,确保设备的稳定高效运行。
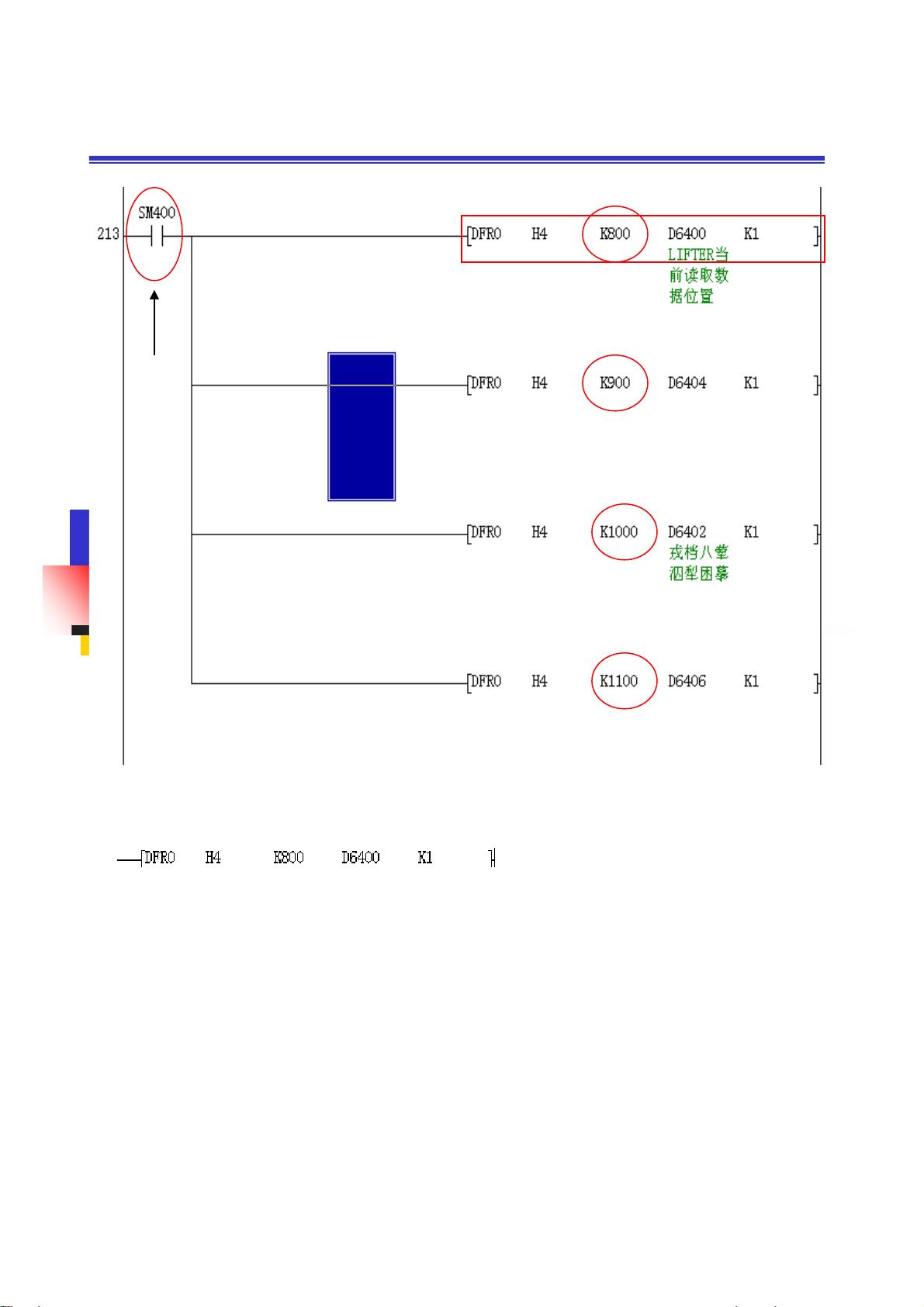
6.SERVO 电机运行的当前数据读取专用指令和写法
电机当前数据读取专用指令
实时
读取
伺服电机当前数据读取的专用指令和写法
DFRO 是 DFROM的简写模式 32位数据的读取,当前数据可能大于16位
K800 K900 K1000 K1100 分别是轴一到轴四的伺服电机当前数据读取的
专用代码
D6400 D6404 D6402 D6406 是数据读取都得存储地址
6
剩余28页未读,继续阅读
2022-10-16 上传
2023-03-16 上传

她说那里是晒黑的
- 粉丝: 131
- 资源: 90
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
