KUKA机器人Devicenet研讨会手册FBT DEV KRC2 R01
需积分: 10 165 浏览量
更新于2024-07-23
收藏 6.46MB PDF 举报
本资源是一份由KUKA机器人公司出版的名为"Workbook FBT DEV KRC2 R01 en"的Seminar Workbook,专注于FIELDBUS技术特别是Devicenet在KUKA系统软件V4.x/V5.x版本中的应用。这份手册是针对KUKA系统软件专家研讨会而编写的,特别关注KUKA机器人的配置,如Kuka配置和Devicenet现场总线。
Devicenet是一种基于ISO/OSI模型的工业现场总线标准,它允许设备之间通过网络进行通信,实现了设备级的集成和数据交换。在本手册中,读者可以学习到如何配置KUKA机器人以与Devicenet网络无缝连接,包括硬件设置、网络拓扑设计、通信参数调整等内容。作者强调,虽然手册中的信息经过了检查和验证,但可能存在未详述的其他功能或因技术更新可能带来的变化,因此用户应理解并非所有未提及的功能都适用于他们的控制器,且在进行替换或服务工作时,对这些额外功能不作任何承诺。
此外,版权方面,未经KUKA RobotergmbH明确许可,不得复制或向第三方透露此文档的任何部分。该手册受版权保护,提醒读者在使用过程中尊重知识产权。KUKA RobotergmbH对于技术信息中的任何错误概不负责,但会定期更新文档以确保信息的准确性,并在后续版本中修正任何发现的问题。
这份Workbook提供了宝贵的实践指导,帮助技术人员深入了解和优化KUKA机器人在Devicenet网络环境下的性能,是现场总线技术在KUKA应用中的重要参考文献。然而,用户在实际操作时应结合最新的官方文档和技术支持,确保遵循最新技术规范和最佳实践。
Introduction field bus technology
16 / 148 Workbook FBT DEV KR C2 03.06.01
I 03.09.2003 I College I PRhI 7
KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.de
© Copyright by KUKA Roboter GmbH College
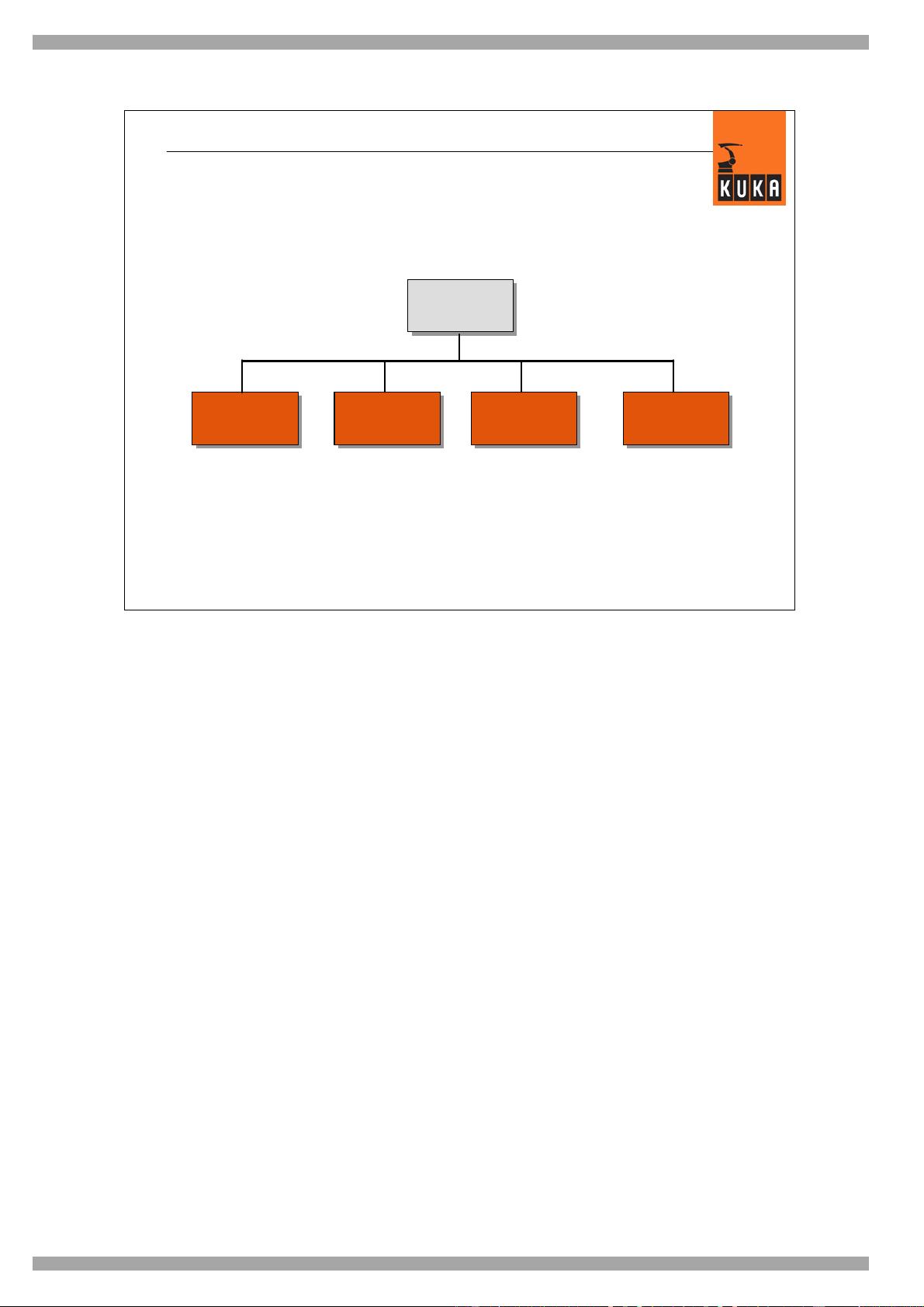
Master/slave (Profibus or DeviceNet)
Master
Slave Slave Slave Slave
Master/slave
In the master/slave bus access procedure, the bus traffic is controlled by the master. The slaves answer
only in response to a prompting telegram from the master. Otherwise the slaves remain passive.

剩余147页未读,继续阅读
2014-06-21 上传
2008-06-11 上传
2021-03-27 上传
2008-11-17 上传
2008-04-02 上传
2024-01-05 上传
2024-01-05 上传
2024-09-05 上传

yzl1990123
- 粉丝: 13
- 资源: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
