无人机航拍影像中全景马赛克的高效拼接技术
下载需积分: 8 | PDF格式 | 667KB |
更新于2024-08-12
| 148 浏览量 | 举报
"全景马赛克在无人机航拍影像中的应用"
全景马赛克技术在计算机视觉、机器人导航和虚拟现实领域具有重要的应用价值。本文主要探讨了全景图像拼接(也称为全景马赛克)的具体过程,并提出了一种基于下采样的坐标变换拼接方法,旨在减少处理时间。在该方法中,首先通过下采样来压缩图像,然后在原始图像对应点进行拼接。特别地,选择中间图像作为参考图像,其余图像则通过转换矩阵直接拼接到参考图像上。
考虑到无人机航拍影像的光照条件,相邻图像仅保留一个重叠区域进行融合,这有助于减少计算复杂性并提高效率。实验部分,作者测试了不同分辨率的图像,结果表明,这种方法具有良好的缺陷容忍度,同时消耗的时间较少。
II. 图像拼接过程与坐标变换
在全景图像拼接过程中,首先需要对采集的无人机航拍图像进行预处理,包括校正几何畸变、调整曝光和色彩平衡等。接着,通过特征匹配确定相邻图像间的对应关系,形成变换矩阵。传统的全景拼接方法可能会遇到时间开销大和计算复杂的问题,而本文提出的下采样策略有效降低了这些挑战。
III. 下采样与快速拼接
下采样是一种降低图像分辨率的技术,可以显著减少计算量。在本研究中,下采样后的图像用于初步的拼接操作,这样可以快速找到对应点,构建出粗略的全景图像。然后,利用上采样和精细的坐标变换将其他图像精确地叠加到参考图像上,从而实现高分辨率的全景马赛克。
IV. 光照补偿与重叠区域处理
无人机航拍时,由于光照变化和拍摄角度的影响,相邻图像间的融合是个难题。论文中提到的方法只保留一个重叠区域,减少了光照不一致带来的影响。这种简化处理在保持图像质量的同时,加快了拼接速度。
V. 实验结果与分析
实验部分验证了所提方法的有效性和效率。通过对比不同分辨率的图像拼接结果,证明了这种方法在保持良好图像质量的同时,大大减少了计算时间。这对于实时或近实时的无人机航拍影像处理至关重要。
"全景马赛克在无人机航拍影像中的应用"这篇研究论文提出了一个创新的、基于下采样的坐标变换方法,以优化全景图像拼接过程,特别是在无人机航拍场景中,能有效提升处理效率,降低计算复杂度,对于无人机影像处理技术的发展具有积极的推动作用。
An Application of Panoramic Mosaic in UAV Aerial Image
Jinwen Hu
1
, Yihui Zhou
1
, Chunhui Zhao
1
, Quan Pan
1
, Kun Zhang
2
, Zhao Xu
2
Abstract— Panoramic mosaic plays an important role in the
field of computer vision, robot navigation and virtual reality.
This paper summarizes the specific process of panoramic
stitching and proposes a coordinate transformation stitching
method based on down-sampling. In order to reduce the
processing time, images are compressed by down-sampling
before processing, and spliced in the corresponding points of
original images. Especially, the middle image is chosen as the
reference image and the others are directly spliced onto it by
transformation matrix. Considering the illumination of UAV
aerial images, just one overlapping region of the adjacent
images is remained when doing the fusion. In the experiment,
images with different resolutions are tested. The results show
the performance of good efficiency and little time consuming.
I. INTRODUCTION
In recent years, the demand for panoramic image is
becoming more and more urgent, along with the develop-
ment of computer technology. As an emerging technology,
panoramic mosaic has attracted many researchers attention,
and it has been applied in many areas such as geological ex-
amination, military surveillance, Minimally Invasive Surgery,
video conference and so on.
Panoramic stitching [1] is the process of seamlessly align-
ing and combining multiple images with overlapping fields
of view to form a high-resolution output image. In many
literatures [2]–[4], image mosaic is usually considered as
a multi-image matching problem, and uses invariant local
features to find matches between all of the images, which
accompany high computational complexity. But in most real
applications with a single camera, images are mostly taken
in order and each two adjacent have overlapping areas.
The rest of this paper is organized as follows. Section II
summarizes the process and general problems of panoramic
mosaic. In Section III, panoramic mosaic algorithm is pro-
posed for UAV aerial images. The experiment results are
shown and analyzed in Section IV. Finally, we conclude this
paper and conceive future work in section V.
II. OVERVIEW OF PANORAMIC MOSAIC
A. Process of panoramic mosaic
Nowadays, many image stitching methods have been
proposed. Although they are different in the details of the
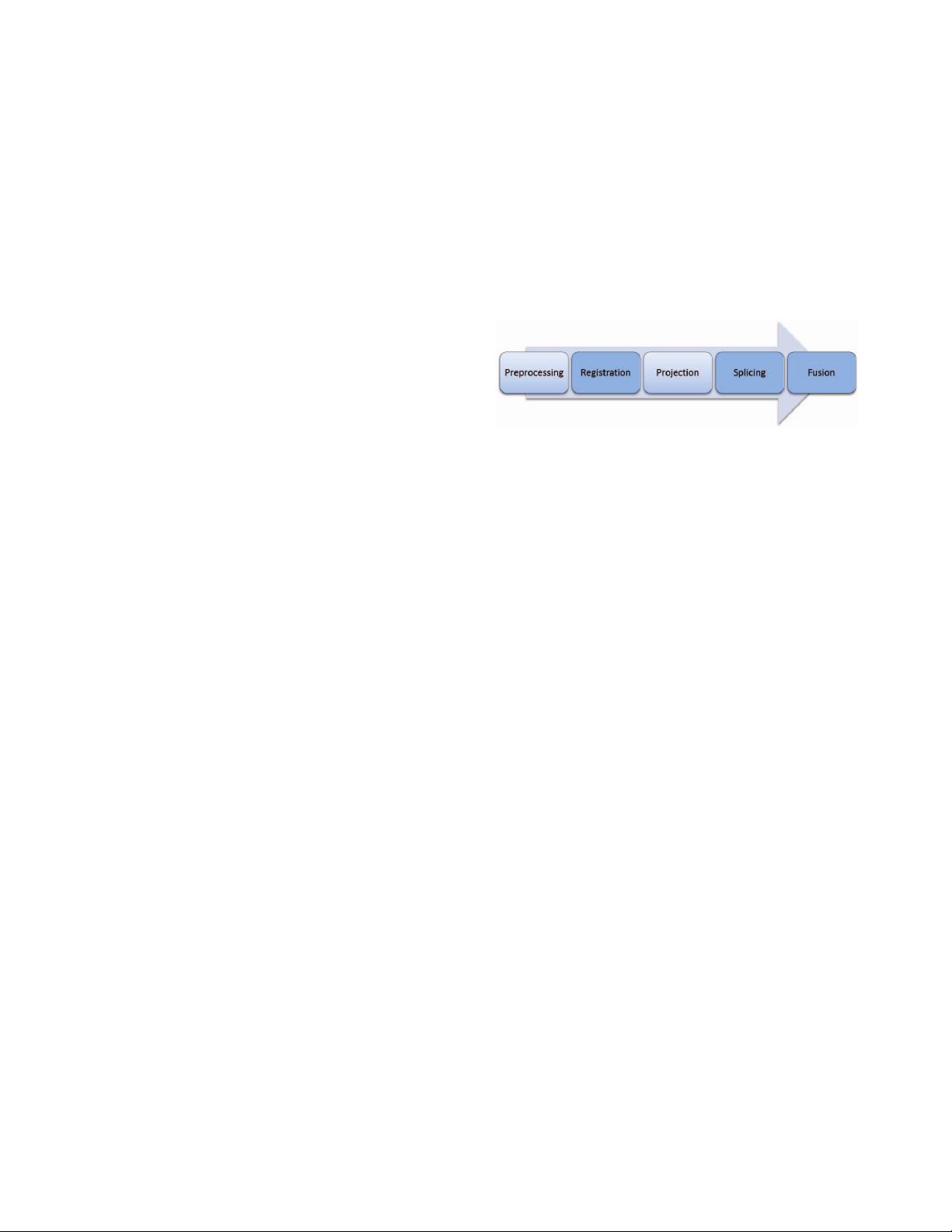
algorithm, the framework of the steps is the same. As shown
in Fig. 1, panoramic stitching is basically made up of five
1
Jinwen Hu, Yihui Zhou, Chunhui Zhao and Quan Pan are with
the School of Automation, Northwestern Polytechnical University, Xi’an,
Shaanxi, China.
2
Kun Zhang and Zhao Xu are with the School of Electronics and
Information, Northwestern Polytechnical University, Xi’an, Shaanxi, China.
Corresponding author: Chunhui Zhao (Email: zhaochun-
hui@nwpu.edu.cn)
steps: image preprocessing, image registration, panoramic
image projection, image splicing and image fusion. Image
registration, splicing and fusion are the key steps which
determine the performance of the stitching method.
Fig. 1. Flowchart of panoramic stitching.
Image preprocessing is to eliminate the possible adverse
effects before processing. The main purpose of image prepro-
cessing ensure the accuracy of the next image registration,
which is similar to filtering and enhancing. Filtering algo-
rithms we used commonly include median filter, Gaussian
filter, etc. Image registration includes two parts: feature
extraction and matching.
The first step for stitching is to extract the characteristic
information of two adjacent images to provide the basis for
image matching. There are two main types of detecting and
matching features in images [5], area-based methods and
feature-based methods. Area-based methods use correlation
of intensity patterns of a pixel with the intensity pattern
around the corresponding pixel in another image, which
make them sensitive to changes in viewing position, absolute
intensity, contrast and illumination. Feature-based methods
are based on intensities in the images rather than image inten-
sities themselves. There are two features that are commonly
used, edge detectors and interest point detectors. Interest
points, as SIFT feature [6], Surf feature [7], Orb feature
[8], are robust to changes in lighting, rotation, viewpoint,
translation and scale.
Since each image is captured by camera at different angles,
they are not in the same projection plane. If the overlapping
regions are spliced directly, the visual consistency of the ac-
tual scene will be destroyed. So we need to obtain projection
image, and then splice the image. There are several projec-
tion models such as planar projection, cylindrical projection,
cube projection and spherical projection.
If we use the pattern matching, we can do the splicing
work directly by the translation parameters we calculated
before. If we choose the point features, we need to calculate
the homograph between two images through matching points,
and then convert image coordinates into new.
After all the images are processed, in most cases, however,
it is not a perfect panorama, and some seams at the boarder of
2017 13th IEEE International Conference on Control & Automation (ICCA)
July 3-6, 2017. Ohrid, Macedonia
978-1-5386-2679-5/17/$31.00 ©2017 IEEE 1049
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐



weixin_38747087
- 粉丝: 77
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
